Slightly over 30 years ago, we were promised by Marty McFly that by the year 2015, we would have hover-board and flying car. But unfortunately, McFly is a filthy liar and we still do not have either of these after one year. While we may not be able to fly around on our hot pink hover-board while donning the freshest of kicks any time in the near future, the advent of the driving cars will soon be upon us. There’s certainly no doubt that there’s pleasure to be found in driving, whether derived from a nice low grumbling of a V8 or simply flow the mechanical response with each input, but would it not be nice to take your hand off the wheel to watch a movie or catch up on emails instead of having to pay attention the soul crushing existential crisis that we call a traffic jam?

Jests aside, traffic related injuries account for a significant portion of unnatural fatalities each year. Despite the ever improved integrations of crash systems like the crumble zone and strategically placed air bags, the numbers remain disconcertingly high. In particular, these systems only aid to reduce the danger caused by the impact, but they do not contribute to the mitigation of accidents. In other words, previous advances in technology has solely been focused on a  passive reaction system and not an active one – and it is exactly therein lies the key to fully reducing number of traffic related injuries. There’s only so much that can be done to reduce the damage caused by a 2 ton truck broadsiding another vehicle – short of making the entire passenger compartment a reinforced sarcophagus (arguably more for convenience than safety).
passive reaction system and not an active one – and it is exactly therein lies the key to fully reducing number of traffic related injuries. There’s only so much that can be done to reduce the damage caused by a 2 ton truck broadsiding another vehicle – short of making the entire passenger compartment a reinforced sarcophagus (arguably more for convenience than safety).
For the longest time, active systems have not really been feasible as there has not been a push to wire a bunch of sensors up to a car. However, with the information age, comes too, the convenience of having sensors on all the things.  This opens up the opportunity of developing active systems in vehicles. The most useful of which will be, of course, for collision avoidance. No doubt that this would be by far the most important technology that needs to be developed before the first flying car, or whatever we choose to call it by then, could hit the sky. Partially because the cruising speed of these vehicles will be very high so a head on collision will probably have a delta V in the order of a Mach or so. Added to that, falling down another few thousand feet post collision will not aid the survival rate; that’s of course under the assumption that your entire everything won’t be vaporized in the collision, which is a pretty poor assumption to make.
This opens up the opportunity of developing active systems in vehicles. The most useful of which will be, of course, for collision avoidance. No doubt that this would be by far the most important technology that needs to be developed before the first flying car, or whatever we choose to call it by then, could hit the sky. Partially because the cruising speed of these vehicles will be very high so a head on collision will probably have a delta V in the order of a Mach or so. Added to that, falling down another few thousand feet post collision will not aid the survival rate; that’s of course under the assumption that your entire everything won’t be vaporized in the collision, which is a pretty poor assumption to make.
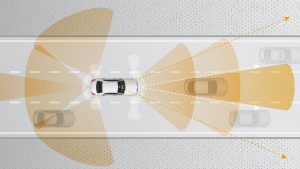
But back to the present day, what do we have at our disposals in these new generations of vehicles? In this example, we’ll use the Tesla Model S or the BMW S-class as they are some of the most well equipped cars. Here’s their sensor arsenal and let’s go through them:
Cameras: Pretty obvious one here. They are essentially like our eyes, so they’re pretty much useless in low light condition and needs time to focus on certain object in order to get a good image. Another down side of cameras is the fact that the raw data has no real intrinsic value and so they must be processed first before they are of any value at all to the system. Considering that in order to cover a full sphere of vision, the car will need to be installed with at least a dozen high definition camera. Considering the fact that we are trying to mitigate impacts, which mean that the system will have less than a second to response, this huge load straining on the system is not favourable. The upside is that an IR camera added such that problems with viewing in the dark can be more or less mitigated.
GPS: Again, familiar to all of us. This system has not much use since it usually has an accuracy of a few meters which is far too imprecise for our use in collision avoidance. That being said, the location data of the car can be used to determine how likely an event is to occur i.e. if it’s in a wood, then the system will immediately be on the lookout for deers/other animals crossing the road and if it’s in a large city, it will look out more for pedestrians.
Radar: This one’s obvious, more or less the ‘go to’ system to scan for objects and distance from vehicle. It has the downside of the fact that it cannot be used to identify the object or interpret the data in any other way than in manner that is similar to ‘there’s a thing this big over there and it is moving in that direction’. The fidelity of the data acquired by the system is also most likely fairly low as well
Ultrasonic sensors: This system has a range of circa 5 m, thus it is very useful in slow traffic or very dense areas. However, in fast moving scenarios, it is entirely useless.
As we can see, in the most advance of cars, there are more or less enough sensors equipped, or at least the types of sensors required for some level of autonomy. And of right now, a lot of them do have some sort of system to automatically break when a possibility of collision is detected. However, these are more or less relegated to the decision of breaking or not. It is essentially sensing the presence of objects as black boxes it should avoid instead of actually identifying the object.
To move closer towards a fully autonomous vehicle, the system must be able to distinguish between the different types of objects it may encounter, from animals to machines. As pedestrians are the biggest at-risk groups in traffic collisions, it is a wise choice to start with creating a system that could avoid pedestrians, even at relatively high velocities.
Traditionally, the process of object identification, situation analysis and resolution are divided into three separate processes. This is due naturally to the fact that there are so many factors that must be processed in each section. However, as we are simplifying the system significantly, they can all be grouped together and that’s what we’re going to do here.
Pedestrian Identification:
The pedestrian is first identified using a fairly complex but can be simplified down to being part of being compared to a probability mass function. Or rather, it is check whether a blob looks like a human or not.
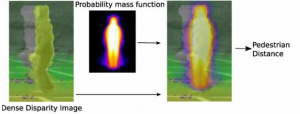
The measurement of distance between vehicle and object once the object is identified is fairly simple and does not require anything past pointing a Doppler radar/normal radar in that direction. At the same time, the velocity of each object can also be calculated based on the distance data and imaging data acquired. Tracked over a time interval of as few as three frames, the object’s velocity can be fairly easily calculated.
This information is then transferred onto the next stage where the situation is analysed, to assess for the time that is left until different event occurs, such as how long it would take to break, how long it would take to steer out of the way and finally how long it would take until collision.
This can naturally be broken into several parts:
Time to Break and Time to Collision:
These are obviously the most simple processes. As they are naught more than a basic physics calculation of how long it would take to come to a complete stop to avoid a collision or how long it will take on the current trajectory for the collision to occur. These are very basic physics calculation that anyone with a fundamental understanding of physics can easily calculate. They are also very simple to implement.
Time to steer:
The time it would take to steer in order to avoid collision with an object. This is far more complex as the system must not only calculate how long it would take for the car to steer around the object, it must also meet several constraints in that: the evasive maneuver must be feasible and the evasive maneuver must not result in a different collision. Additionally, as the driver would still be in primary control thus a fast yaw change should be avoided when possible to avoid the driver fighting the automatic maneuver which could throw additional difficulty into steering if ignoring driver interface is to be avoided. Unfortunately, due to the nature of human beings, the latter is not a possible option.
Automatic steering also includes a variety of concerns as well. One of them is that the system would have to, depending on circumstances, avoid multiple objects in succession. This would also lead to the scenario where a collision is certain to occur and the system must choose which target to hit (do you want to hit a kid at 20 mph or a family van at 50 mph?). This adds an incredible layer of unavoidable complexity into the system.
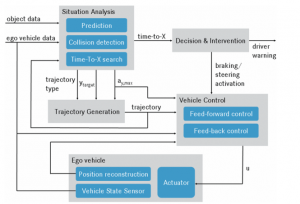
Once these parameters are calculated (and they are constantly calculated at the minimum time interval), they are passed on to the next function that will make the decision on how to intervene.
Decision and Intervention:
As the driver is still in control of the vehicle, first signals will be given to alert the driver of possible collision. If the time to collision and the time to break are equal to one another and the driver still has not responded then the system will automatically perform a breaking maneuver. However, if a breaking maneuver becomes impossible before the driver responded then the system will automatically make an automatic evasive maneuver in conjunction with cutting driver input during the duration of the evasion. Once the trajectory has been determined, it is passed on to the final part of the system.
Vehicle control:
This is essentially fairly simple and have been more or less been taken care of with the advent of technologies like traction control. In this step, the goal is to ensure that the vehicle follows the designated path. Similar to in the case of traction controls, the vehicle responses are completed at a hardware level using specifically designed chips.
As we can see, even though the process in a vehicle collision avoidance system can be very complex, the technology required to complete such tasks are on the verge of being standard in today’s vehicle. In particular, the fast hardware power that is required to process the variety of inputs into the system are more or less here (thank you Moore’s Law). Thus these systems are only years away from commonality. The biggest hurdles now will be the testing required to pass government standards. It is also here that a lot of problems still lie. From the point of view of the manufacturer, it is simply not good enough to simply reduce the number of vehicle collisions. The vehicle must perform the maneuver in a way that the company is protected from litigation. Think of it like this. If the vehicle has to choose between going on the course defined by the driver and hit a group of toddlers in the park, or it can take an evasive maneuver and hit a single person on the other side of the road, sometimes it may be better for the vehicle to just plow through the kids and put the blame on the driver. The alternative would be going into a costly court battle because it is technically the system that decided for the person on the other side of the road to get hurt. This is naturally, a whole different can of worms that we wish not to open.
This application does make sense. Taking into account that more than 3,000 people die per day in car accidents and an additional 90,000 get injured per day, I would venture to say that any improvements that can be done would be considered a success to the industry. Even though the automatic steering or breaking could potentially result in a life being saved, this type of integrated electrical/process engineering, in my opinion, could be prone to hacking. This would be one of the very few negative impressions I would have pertaining to this device. Personally, I would probably not use this type of device, because once automatic braking and breaking are integrated into automobiles, automatic driving would not lag far behind. I would still like to feel the rush of driving on my own; that being said, once I reach a certain older age, this would definitely look more appealing and tempting, as well as safe, way to drive.
The control aspect also makes sense and the train of thought, I believe, is also accurate. The variables are not clearly mentioned but the general gist is present of how each variable plays into the overall scenario. The hardest variable to control would be the decision making of the car were it to have to decide between two different obstacles. Since every obstacle’s dimensions (density, volume, value) cannot be accounted for, it could in certain situations, choose the more costly outcome (either quantitatively or qualitatively; refer to the dangers presented in the last couple paragraphs of the article). With this type of application, a PID controller would most likely need to be used, where stability and precise reference following are required, based on the constant mobility of the vehicle.
Since these applications will require a controller aspect of some type, posit the types of action that might be appropriate for this application. Suggest ways that the developers of the control scheme for this application might reasonably be able to tune/develop controller parameters!
I thought the article was written very well, with some quite funny puns/jests sprinkled in, which made the read enjoyable. The topic is intriguing as well and does include arguments for both pro and con of this idea. Nicely done
Driving, at least in the United States, is very dangerous with more than 3,000 people die per day in car accidents and an additional 90,000 get injured per day, just as you said. Driverless vehicles will need to be even safer than that and given the existing software that does not seem possible. Although self-driving cars would be amazing to have, I do not think they are very practical. In addition the price of these vehicles will be so expensive that most of the general public will not be able to afford it.
In the future I do see driverless vehicles becoming prominent in society, however, there are many aspects that need attention. One of the major problems that I see is with regards to this part of the blog… “That being said, the location data of the car can be used to determine how likely an event is to occur i.e. if it’s in the woods, then the system will immediately be on the lookout for deer or other animals crossing the road and if it’s in a large city, it will look out more for pedestrians. I personally don’t trust the maps on my phone to get me from Easton to Bethlehem so I don’t get how I’m supposed to comfortable letting my self driving car use it as its main form of navigation.
Another issue I see is with the sensors. Before people all toss their drivers’ licenses, a self-driving car must be able to distinguish between dangerous and harmless situations or else car rides will become very interesting. For example, potholes or a nails below a tire are incredibly hard to spot until just before they’ve been hit, while a paper bag floating across the highway may be very conspicuous, but not very dangerous, he said. The cars also need to decide in sufficient time whether a pedestrian waiting on the sidewalk is likely to walk into traffic, or whether a bike is going to swerve left. Human brains do a masterful job of sorting and reacting to these hazards on the fly, but the current crop of sensors just isn’t equipped to process that data as quickly.
Something I think will be necessary is communication between the driverless vehicles. Once driverless cars begin to proliferate, they will need a much better way to communicate with other vehicles on the road. As different situations emerge, these cars will need to flexibly adjust to other cars on the roadways, reroute on the fly and talk to other driverless cars. But right now, communication among individual self-driving cars is minimal. If this isn’t resolved traffic and accidents might be worse then they are today!
Thank you for an insightful and humorous blog post!
All jokes aside, I think that your blog’s title hits a really important point—although the concept of a completely “self-driving” car might be a little scary to some, it could certainly be useful as a backup defense-type mechanism that accounts for poor human operation of a car (i.e., drunk driving). When I started learning to drive, my parents always told me that it’s always the other drivers and my surroundings that I’d have to be most careful about. An autopilot feature on a car could potentially be useful in improving car safety features and minimizing collision frequency, especially amongst newer, poor, or incapacitated drivers who are unaware of their surroundings. I think that this application is a hugely important one, but is also something that needs careful, thorough design in order to be successful.
The selection of the controlled, manipulated and disturbance values could have been made a bit clearer, especially from a technical perspective. It seems to me that the controlled variables would be the car’s speed and direction, while the manipulated variables would be the break application and steering wheel output. Disturbance variables in this system could be anything that unexpectedly alters the course of the car, such as a sudden change in the human operation of the car (a sharp slam on the breaks or a turn of the wheel) as well as natural disturbances such as ice on the road.
A process like this would require a very careful design in order to ensure that a safe and reliable process control mechanism is developed. Poor design of such a complicated and important system could unfortunately result in otherwise avoidable accidents. As a result, there would have to be many variables that would be considered in the implementation of such a system. For instance, it would be necessary for the car’s control system to be able to differentiate between a nearby moving object and a threat. For instance—is that person walking into the street going to actually come in front of the moving car, or stop when he or she notices the oncoming traffic, as most pedestrians do? It would be most beneficial if unnecessary adjustments from the car’s automatic control system could be avoided.
For a control system as complex and intricate as the one described in this piece, it would be most appropriate for a proportional integral derivative (PID) controller to be implemented. Although more complicated and expensive, a PID controller would offer the precision and predictive capability required to fully operate a vehicle autopilot. Developers of a control scheme for this type of application might be able to tune control parameters by adjusting for the sensitivity of the car to moving objects of certain sizes.
This video may prove useful in your development of more technical components of your self-driving car design: http://kdvr.com/2016/04/16/grandmother-freaks-out-behind-wheel-of-teslas-self-driving-car/
This application does make sense in theory however I feel that there is a lot more to consider outside of just the difficulties associated with the creating the controls aspect of the idea. First off I think coming from an outside perspective, for example from an insurance company standpoint, supporting or covering a car with such capabilities would be a MAJOR risk. If the car was to make a calculated risk that involved saving one person but resulted in injuring others who would be help responsible? A car is unable to pay for hospital bills on the off chance that the car’s reaction was to break to avoid a pedestrian but resulted in the car behind them to rear end them. Also it would concern me that people would possibly use the cars ability to “drive” an excuse to get behind the wheel while drunk. None of these would be an issue of course if everyone’s cars had these abilities.
I want to say, after kind of saying all the reasons that it wouldn’t work, that I agree that this is a good idea. I have thought to myself many times that wow wouldn’t a car that drove itself be amazing, like Will Smith’s car in the I am Robot movie. Having a car that could be proactive instead of reactive would truly be ideal however it would be a difficult project to swing. For example just a short Tori story, my mom has the backup camera/ sound alert for preventing running into things. Even with all of that my mom still managed to back into my car in the drive way. In that moment myself (and my car) would have appreciated this type of control, however at the same time if my mom’s car slammed on the breaks randomly every time her back up camera went off.
If after many years this device was perfected I would 100% be interested as a customer however I do believe it would be a very long and difficult journey.
It is a bit hard for me to understand the types of car controls that are already in place however I think the point that the group made was good. Cars already have good controller systems in place especially in the most recent years with back up cameras linked to sensors and proximity alerts. If they were able to make a controller that controlled the controls (pardon how that sounds) they would be able to create a proactive system that responded prior to anything happening.
Unfortunately thinking about what it would take for these controllers to work at the level they should in comparison to what we have learned in class the task of designing this type of car seems difficult. The controller’s reaction time would need to be super fast especially when the car is moving at high velocities. I think the biggest challenge will be considering all of the variables going into this controller. For example the car would have to see a pedestrian choose how to react but also not react in a way that could potentially injure the driver. I am uncertain of what type of controller may work best due to a lack of understanding of how the other controllers within the car work and how so many small variations in the disturbance variable would impact the controller.