It has happened to every driver at one point or another. You are driving down the highway with the windows down enjoying the music coming from the radio. Your mind drifts to the fun times you had while listening to that same song, maybe it was a previous vacation or even the awkwardness that was middle school, either way your mind is wondering, not quite aware of your surroundings. But then you hear it, the loud whirring that all drivers dread, you quickly look in the rear view mirror and sure enough you see the flashing red and blue. You then look at the speed-o-meter, shoot, you can’t remember what the speed limit is, but you are rather certain 95 mph is not it.
But it does not have to be like that, there is a magical system that when used properly guarantees the speed will be obeyed, even when you are more focused on nostalgia and less on the gas pedal.
Cruise control is an option that many cars are equipped with today. The usage of cruise control in today’s world depends on the driver and the car. Therefore, while cruise control is not necessary to the functionality of the car, it does make lengthy, tedious road trips more manageable. In addition, cruise control ensures that you stay at the speed limit. It can definitely save some one from getting a ticket or two by ensuring that the driver does not run above the speed limit, making it a valuable entity.
The main purpose of process control is to minimize the effect of the unexpected and to maximize the efficiency of the expected. When it comes to the system of cruise control in a car, the expected would be the function of having the car navigate at a constant speed set point without having the user to press on gas. The unexpected would be when the system does not function properly due to disturbance variables that affect the speed of the car. The controlled variable in this system would be the speed of the car. If the speed of the car matches the input speed, the system is functioning as desired. If the speed of the car is not reaching the set point, this means that there are perturbations present in the system. These perturbations could arise from the various disturbance variables. Disturbance variables can include changes in the road, such as hills or the composition of the gravel. They can also include weather conditions, traction, tires, car malfunctions, such as leaking gas and oil, or even a broken belt or fan. When these disturbances occur, the system can correct them via a feedback controller.
The feedback controller measures the output speed of the car using a sensor and then sends signals back to the controller, which can increase the work done by the system, adjusting the speed as necessary. Unfortunately, unexpected disturbances can cause accidents if the environment of the car is not suitable for the speed of the car. For example: when driving in rain, the car may hydroplane, which would cause the overall speed of the vehicle to seem less when measured by the sensor. With cruise control, the sensor would determine that the speed has decreased and attempt to increase the work needed to make up for the loss of speed. The system would put the work to make the tires spin faster. Since tires do not have decent traction in rainy weather, the increase in tire rotation would cause accidental dilemmas that are not accounted for with the use of cruise control. In addition, the feedback controller would not be able to fix any issues within the car that could cause a change in speed. For example: if there is a gas leak in the engine, this would go unnoticed by the sensor from the cruise control in system. If the output of the car decreases due to this error, the cruise control sensor would not realize that it is due to the gas leak, and this could cause for more work to be put towards increasing the speed of the car. It cannot fix any other parts. This is where the process could be inefficient since the feedback control is only measuring the output speed and changing the work done by the engine based on the sensor measuring the output.
The manipulated variable of a cruise control process would be the input of the velocity. It is easy to determine the speed one wants since speed limits are usually given every few hundred feet along the highway. It is important to note that one can get achieve the set point that is desired without a cruise control system. However, the purpose of cruise control is to facilitate this process on the driver and to allow the driver to be able to focus more on the road rather than the speed at which he or she is driving at. The manipulated variable can be input into the system using the cruise control buttons, usually found on the steering wheel to make the ease of access easy and safe while driving. A video demonstrating this process on a 2015 Volkswagen Golf SportWagen is provided below.
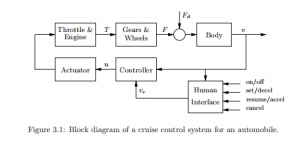
From the figure above, one can see the feedback control system that is established for a cruise control system. The feedback occurs when a sensor registers the speed that the car is exhibiting and that information is then transmitted back to the controller of the system. From there, the controller can decide what the next action of the system will be and will send that information to the actuator. The actuator will allow the throttle and engine to put more or less work into the system to allow for the gears and wheels to be adjusted and for the system to accommodate for a new speed output. These changes are due to pressure changes from the actuator. Human interface is a part of the cruise control since the driver needs to decide what the set point of the system or speed of the car should be. This can occur with the choice of the various options available (on/off, set/decelerate, resume/accelerate, and cancel) in a cruise control operating system in a car.
As one can see, the cruise control system has revolutionized the car industry in recent years. Drivers do not have to worry about running above the speed limit since there is an option to control the speed of their control. Obviously, the driver can still choose to accelerate if he or she wants to but the cruise control system is available to help. By allowing drivers to focus more on the road rather than the speed of their car, the roads are safer. As technology improves, there are other feedback systems that have been designed to not crash into other vehicles, to monitor the distance between other cars, and to park with the use of cameras guiding one into the spot. Future roads will only become safer as time goes on.
Works Cited
Astrom, Karl Johan. “Review: Feedback Systems: An Introduction for Scientists and Engineers.” The Quarterly Review of Biology 83.4 (2006): 1-387. California Institute of Technology, 16 Sept. 2006. Web.
The application of an automatic car does make reasonable sense, considering it is an already established system. Building upon a process that has already been implemented in some industries is essential to further optimizing the product with researched and modeled improvements. Using a feedback control system for a car is reasonable since it eliminates having to worry about running above the speed limit, which is relatively appealing. I could absolutely envision myself using this device since it provides a more relaxing way to drive and therefore eliminate some stress that is present in everyday life. This could be very beneficial for any stressed individual, from students to parents to employees. Another appealing aspect of using this product is the fact that it does make lengthy, tedious road trips more manageable.
The control aspect does make reasonable sense. Controlling the speed with fuel input is sensible since applied fuel can apply energy to a system which can be turned into velocity. However, the article mentions that the manipulated variable of the cruise control process would be the input of the velocity. This statement seems incorrect since it would make more sense to control the speed output by manipulating the fuel input. However, it would not make sense to increase fuel to decrease the car’s speed; the action taken to decrease velocity would be letting up on the accelerator. Furthermore, the plethora of disturbance variables is delightfully informative. However, it is slightly concerning especially considering the lack of solutions to the disturbances. Clearly more research has to be conducted in order to create a beneficial and effusively optimized process that can be fully implement.
It might be appropriate to use a proportional integral or proportional integral derivative action controller for this application. The proportional integral controller would respond to the accumulated error in the speed output over time by applying greater fuel to the system and observing the changes in the system. The PID controller would account for possible future values of the error in speed based on its current rate of change. The controller parameters might be reasonably tuned with a continuous closed loop control. This loop would include the car or vehicle being the process, the speed or velocity of the car being the process variable, the speedometer being the sensor, and the accelerator is the actuator that applies a corrective effort to the process per the instructions of the controller.
I can totally image the scenario you described in your blog where my mind fades out and I put myself and other people in dangerous. I have heard my friend complained about getting a speed ticket when they did not realize they were driving that fast because everybody else was driving at the same speed. A cruise control system can definitely help people with situation like this. Especially for some one who is very distracted about controlling the same speed for the entire time. Many cars are equipped with cruise control, I have seen people used it before, I personally have not used it. Some of my friends told me that it felt very different from they self driving. However, it does make sure that the speed is constant during the ride.
The set point obviously is the speed limit if the controlled variable is the speed of car. I really like the efficiency aspect you brought up in your blog. The other parameters described in the blog is reasonable. The perturbations I can think of are similar with those in the blog: changes in the road, road conditions, road temperature, and the condition of car. Other disturbance can be driver condition where the driver does not hit the break whenever he/she suppose to. The feed back system suggested by the blog makes sense as well that the feed back controller should correct the behavior of car during cruise controlling. The sensor, in the feed back loop, like described in the blog, can be improved. Like one of the examples given in the blog, the sensor wouldn’t notice the gas/oil leak of the engine where more work was put to increase the speed of car. They could be some potential problems with the sensor where I suggest to put a feed forward controller to the system. Whenever there is a change occurred with the input, if the change excesses a reasonable range, the feed forward controller will then adjust it before the it can effect the output. A potential feedback controller can behave based on a SOPDT and a PID controller where the dead time won’t be so long because of the safety issue, neither will the controlling process to stable, again, because of the safety issue. Some more advanced techniques can be used when designing self-driving system which has been studied these recent years, feed back loops can be used for cars to sense how far they are from other cars, traffic lights and even a stop sign.
Thank you for the vivid imagery in your introduction! It was humorous and really set the motivation behind your project. Some benefits you made obvious in your blog post was the ease of mind associated with cruise control. You are able to set a speed, and then only have to worry about keeping your eyes on the road. I imagine also that for long trips, it can get physically demanding to have to sit in the same position and constantly engage the pedals. Cruise control will take your mind off some of the pain, again letting you focus on the road and your surroundings. Not to mention, it’s more fuel efficient! And who wouldn’t want to save money by doing less. For these reasons I this this application is very helpful, and I plan to make use of it as soon as I get my license….well permit first.
The control variable is obvious in this situation—the car’s velocity with the set point being the speed limit. You also made the manipulated variable very clear, which is the work input to the car. Some disturbance variables you mentioned were changes in the road (large uphills or downhills or even changes in the quality of the road), weather conditions, traction, tires, car malfunctions, such as leaking gas and oil, or even a broken belt or fan. However, you mentioned that the car cannot identify which exact issue is causing the change in velocity. The reactive nature one of the unfortunate downsides of feedback control. To go around the issues that you mentioned, for example poor terrain or weather conditions, the car should have some sort of ratio sensor possibly in place that will tell you the ratio of work being put into the car versus the amount of velocity able to be achieved. Based on a set ratio, the car can lower or raise the set point so that it is not trying to achieve a velocity that is not possible or safe. Other sensors could be put in for the gas to ensure that there are no leaks and if there are maybe alerting the driver that cruise control should be turned off. Finally, another limitation of cruise control is that it cannot account for cars in its surroundings. I think that a feedback/feedforward system that can account for the velocities of the cars directly in front or behind.
As shown in the video, the set point can be changed fairly easily and quickly; therefore, the system needs to respond really quickly without having too much of an overshoot. A PID feedback controller would provide the fastest and most robust method of achieving the set point. The car can be tuned by fitting the response to a step change of the car (maybe in a simulation or something) to a FOPDT or SOPDT, and using the methods taught in class to get the parameters for kc and τi and τd.
This application is one that is easy to understand, useful and has potential to become even better in the future, so thank you for bringing it to my attention!
Over the summer I lived at Lafayette and would often make a long drive home on various weekends to visit my family. During those trips I found cruise control to be particularly helpful because I would often let my mind wander, due to the fact that I had made the trip many times before. In addition, I know how easy it is to get caught up when you’re driving and start going really fast without even realizing it. As discussed in the blog post, the roadways are safer due to the use of cruise control. As one counter argument, cruise control does allow the driver the ability to not continually push their gas pedal, and would possibly make them less responsive to sudden changes on the roadway. For example, if a car in front of you was coming to a stop and you had cruise control on, then you may not realize fast enough your own need to slow down. However, I think this would be unlikely to happen because drivers should know that cruise control is not a free pass for driving where you don’t have to pay any attention to the road. A driver, even when using cruise control, must be attentive to changes on the roadway. I think most drivers do use cruise control in a safe way and it is beneficial to driving.
The implementation of the feedback control makes the most sense for cruise control. The controlled variable, speed of the car, and manipulated variable, input of velocity, make sense for the control application. I like how the blog post listed the many possible disturbance variables. Also, I really liked how the blog post described how unexpected disturbances can cause accidents if the environment of the car isn’t suitable for the speed, and thus the feedback cruise control would not be effective. I believe it is important to establish some of the issues with feedback control in addition to the benefits, and this blog post did a great job describing both. The block diagram describing the cruise control system was helpful to understand how the feedback control would work. Also, I like how it shows human interface as part of the feedback control loop because drivers could change their input based on what is happening with their car or with their surroundings.
PID control may be applicable to cruise control. PID control has fast reactions to change of controller input, increase in control signal to force the error towards zero, and action to eliminate oscillations in the system. When applied to cruise control, the PID controller would allow for a fast response to disturbance changes and consider future errors in speed based on current rate of change. Overall, the blog post did a great job explaining cruise control. I liked at the end the inclusion of more vehicle improvements that could be seen in the future, especially since they are future engineering challenges.
Unlike several students at Lafayette, I am not from the Pennsylvania or New Jersey area. I have a long commute from Boston and often utilize the cruise control setting whenever I can! Cruise control is a simple yet such helpful feature in many modern cars. I feel as though the general public (not just process control students) should understand the relevance of feedback loops and disturbances that are applied to cruise control setting. Now when I put on cruise control, I will think of the process control scheme described above.
Overall, the control scheme of cruise control makes sense. The driver simply puts on the desired speed setting as his or her setpoint. Thus, the car sets its controlled variable as its velocity and the work put into the vehicle as the manipulated variable. Because cars undergo an array of terrain and weather patterns, a variety of disturbances can cause deviations from the setpoint. These disturbances include but are not limited to uphill elevation, rain, snow, traction and basic to extreme car malfunctions. Due to the fact a multitude of disturbances can occur, a feebackloop is implemented because it is disturbance agnostic. A feedforward control system would not work well for this scenario because the feedfoward control scheme needs explicit information about possible disturbances. Similarly to Sam, I feel as though sensors could be installed in order to detect disturbances. Navigation technology such as a GPS system has become such a common tool found in most modern vehicles. GPS systems that have explicit knowledge about road terrain and increasing/decreasing road elevation could send a disturbance signal to a sensor. Another possible sensor could also be radar that detects weather systems (rain, snow, hurricane etc.). Either sensor could transmit a disturbance signal to a feedfoward controller before the throttle/engine block. An internal feedback loop (cascade control) could be installed for the throttle/engine transfer function and gears/wheels transfer function to increase the system’s reactivity to the disturbances as well. I think Sam’s idea of using a ratio sensor is also a plausible idea. The only issue for a ratio controller is the conversion of units between work and the car’s velocity. If the ratio control system failed, then serious problems could arise for the driver such as a car accident. Obviously increasing the number of control schemes becomes more expensive but may result in fewer accidents!
A PID controller would be the best type of controller to install in a car for cruise control. The combination of all three individual controllers will allow the car to react at fast rates and an array of disturbances. If a feedfoward controller was added, the tuning parameters could be found based on a multitude of disturbances. The disturbances can be modified to first order, FOPDT, or SOPDT transfer functions in order to find tuning parameters based on open or closed loop testing. The tuning parameters should be able to react fast and an array of disturbances.