Cameron Darkes-Burkey and Tyler Monko
Not many things are more relaxing than setting the cruise control to 70 miles per hour on a long, empty stretch of highway and letting your mind wander as you let your car carry you to your destination. As the miles go by, you are able to reminisce about all of your favorite events in your past. As you are thinking about your first time that your parents took you to an amusement park, you are able to vividly remember everything about your favorite roller-coaster to the point where you think you can feel the sudden stop that the coaster makes halfway through the ride. Almost too vividly as you are snapped out of your thoughts by your car unexpectedly rear-ending another vehicle on the now not so empty stretch of highway. Now, imagine the same scenario except instead of your car colliding with the vehicle that seemingly appeared out of nowhere, your car slows its speed and follows behind the other vehicle at a safe distance. Although this technology, which commonly is referred to as Autonomous Intelligent Cruise Control, may seem like a feature from the future, it actually is currently used in many of the vehicles of today.
Autonomous Intelligent Cruse Control (AICC), unlike the traditional cruise control that just keeps your speed constant, aims to maintain a constant speed as well as a safe driving distance with the other cars on the road. To function as intended, AICC must be able to control both the speed of its respective vehicle and the distance between its vehicle and the vehicle that it is following. These are our controlled variables or what we are trying to maintain at a certain set point. Because of outside factors, it is impossible for even the best technology to prevent the speed from fluctuating. Since large fluctuations not only affect the safety of a vehicle’s passengers but also may result in traffic citations such as speeding tickets, there needs to be a maximum range in which the speed can vary from the desired set point speed. Since police generally do not issue tickets for speeds that exceed the posted speed limit by less than 5 miles per hour, the acceptable range allowed by the AICC should be within three miles per hour of the desired speed. Keeping the range within 3 miles per hour leaves some additional room for error. A “good” range for the distance of cars is based on the standard rule of thumb to stay 6 seconds behind the car in front of you (this is often the rule for poor weather, so will add a factor of safety during good weather conditions to stay on the safe side). Therefore, using some basic math, we will keep our distance (in feet) more than ((8.8ft*hr/miles)*v) where v is the velocity of your car in mph. Our range for this is a little more strict, allowing for less fluctuation. We believe that the error for the following distance should deviate by no more than 5% from the safe distance set point.
The control of both the speed and following distance is critical to the function of AICC. The distance is especially important as it will help to prevent accidents, and without the maintaining of speed, the primary function of cruise control will be lost. This process is an improvement to driving because it is safer and more economical. By using AICC, the car will be more fuel efficient as the driver will not be constantly alternating pressing the gas and brake pedal down as most drivers do. Also, the safety of the driver will be improved because AICC will help keep your car a safe driving distance away from other cars and reduce rear-end collisions.
Since the speed of the vehicle and the following distance cannot be directly controlled (i.e. they are directly affected by other processes in the car), they will have to be altered in another way. By manipulating variables that can be directly changed by a controller, such as the pressure of the breaks on the wheels and the position of the throttle, the speed and following distance can be maintained within their respective ranges. Additional pressure of the breaks on the wheels can slow the car down or bring it to a stop, and, by opening up the position of the throttle, the car will speed up. Both of these aspects of the process can be controlled, and in this case, it makes very practical sense to do so.
Excluding exceptional circumstances such as Edward Cullen stopping your car with a stiff arm, there are various disturbances during normal driving conditions that will affect the speed and following distance. Disturbance variables are unexpected or unplanned changes that affect the controlled variable. For example, terrain changes including elevation variations and road types will affect the speed of the car. Weather changes could also have a presentable effect. To account for these speed changes, either pressure needs to be applied to the brakes or the position of the throttle needs to be changed. For distance monitoring, changes in the speed of the preceding cars would also require sudden alterations to the manipulated variables.
For our process, a feedback loop is the best since it responds to any disturbances to our controlled variable and will enact changes on the manipulated variables accordingly. A feedback loop will take into effect any disturbance variables that ultimately affect the controlled variables because it takes its measurement after they have already had their full effect on controlled variables causing deviations from their set points.
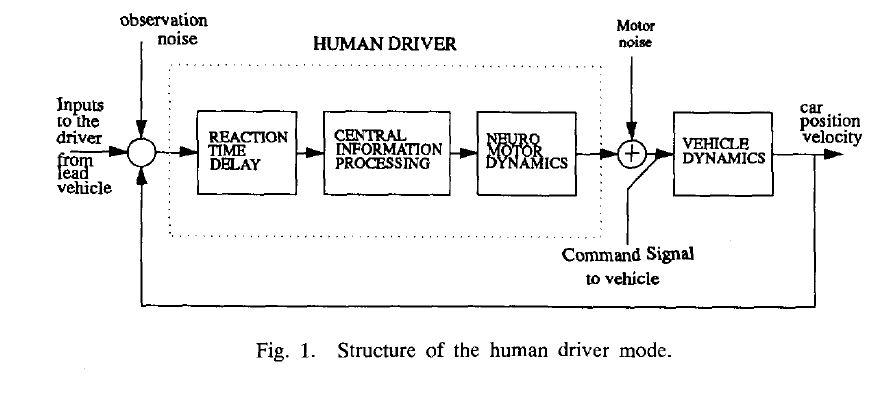
“Driver behavior in vehicle following has been an active area of research since the early 50’s. In vehicle following, the human driver acts as a controller. He senses velocities, distances, and accelerations and decides about control actions accordingly. In order to study these human control actions and their interaction with the vehicle dynamics, several investigators consider the development of mathematical models that mimic human driver behavior” (Ioannou and Chien 658). One commonly studied model is shown in Fig. 1. In this block diagram, note the Reaction Time Delay and the need for Central Information Processing and Neuro Motor Dynamics all of which slow the reaction time down and increase the possibility of an accident. With automation and good sensors involved with Autonomous Intelligent Cruse Control, this human reaction time is eliminated. This allows for safer inter-vehicle interactions giving you the opportunity to occasionally reminisce about those vivid memories.
Citations
Petros A. Ioannou and C.C. Chien. “Autonomous Intelligent Cruise Control.” In IEEE Transactions on Vehicular Technology, Vol. 42, No. 4, November 1993. Web. Site visited on 16 Mar. 2016. <http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=260745>.
Engineering Explained. “How Adaptive Cruise Control Works – Step One for Autonomous Cars.” YouTube. YouTube, 11 Nov. 2015. Web. 16 Mar. 2016. <https://www.youtube.com/watch?v=IMYi3G7dkU4>.