Cameron Darkes-Burkey and Tyler Monko
Not many things are more relaxing than setting the cruise control to 70 miles per hour on a long, empty stretch of highway and letting your mind wander as you let your car carry you to your destination. As the miles go by, you are able to reminisce about all of your favorite events in your past. As you are thinking about your first time that your parents took you to an amusement park, you are able to vividly remember everything about your favorite roller-coaster to the point where you think you can feel the sudden stop that the coaster makes halfway through the ride. Almost too vividly as you are snapped out of your thoughts by your car unexpectedly rear-ending another vehicle on the now not so empty stretch of highway. Now, imagine the same scenario except instead of your car colliding with the vehicle that seemingly appeared out of nowhere, your car slows its speed and follows behind the other vehicle at a safe distance. Although this technology, which commonly is referred to as Autonomous Intelligent Cruise Control, may seem like a feature from the future, it actually is currently used in many of the vehicles of today.
Autonomous Intelligent Cruse Control (AICC), unlike the traditional cruise control that just keeps your speed constant, aims to maintain a constant speed as well as a safe driving distance with the other cars on the road. To function as intended, AICC must be able to control both the speed of its respective vehicle and the distance between its vehicle and the vehicle that it is following. These are our controlled variables or what we are trying to maintain at a certain set point. Because of outside factors, it is impossible for even the best technology to prevent the speed from fluctuating. Since large fluctuations not only affect the safety of a vehicle’s passengers but also may result in traffic citations such as speeding tickets, there needs to be a maximum range in which the speed can vary from the desired set point speed. Since police generally do not issue tickets for speeds that exceed the posted speed limit by less than 5 miles per hour, the acceptable range allowed by the AICC should be within three miles per hour of the desired speed. Keeping the range within 3 miles per hour leaves some additional room for error. A “good” range for the distance of cars is based on the standard rule of thumb to stay 6 seconds behind the car in front of you (this is often the rule for poor weather, so will add a factor of safety during good weather conditions to stay on the safe side). Therefore, using some basic math, we will keep our distance (in feet) more than ((8.8ft*hr/miles)*v) where v is the velocity of your car in mph. Our range for this is a little more strict, allowing for less fluctuation. We believe that the error for the following distance should deviate by no more than 5% from the safe distance set point.
The control of both the speed and following distance is critical to the function of AICC. The distance is especially important as it will help to prevent accidents, and without the maintaining of speed, the primary function of cruise control will be lost. This process is an improvement to driving because it is safer and more economical. By using AICC, the car will be more fuel efficient as the driver will not be constantly alternating pressing the gas and brake pedal down as most drivers do. Also, the safety of the driver will be improved because AICC will help keep your car a safe driving distance away from other cars and reduce rear-end collisions.
Since the speed of the vehicle and the following distance cannot be directly controlled (i.e. they are directly affected by other processes in the car), they will have to be altered in another way. By manipulating variables that can be directly changed by a controller, such as the pressure of the breaks on the wheels and the position of the throttle, the speed and following distance can be maintained within their respective ranges. Additional pressure of the breaks on the wheels can slow the car down or bring it to a stop, and, by opening up the position of the throttle, the car will speed up. Both of these aspects of the process can be controlled, and in this case, it makes very practical sense to do so.
Excluding exceptional circumstances such as Edward Cullen stopping your car with a stiff arm, there are various disturbances during normal driving conditions that will affect the speed and following distance. Disturbance variables are unexpected or unplanned changes that affect the controlled variable. For example, terrain changes including elevation variations and road types will affect the speed of the car. Weather changes could also have a presentable effect. To account for these speed changes, either pressure needs to be applied to the brakes or the position of the throttle needs to be changed. For distance monitoring, changes in the speed of the preceding cars would also require sudden alterations to the manipulated variables.
For our process, a feedback loop is the best since it responds to any disturbances to our controlled variable and will enact changes on the manipulated variables accordingly. A feedback loop will take into effect any disturbance variables that ultimately affect the controlled variables because it takes its measurement after they have already had their full effect on controlled variables causing deviations from their set points.
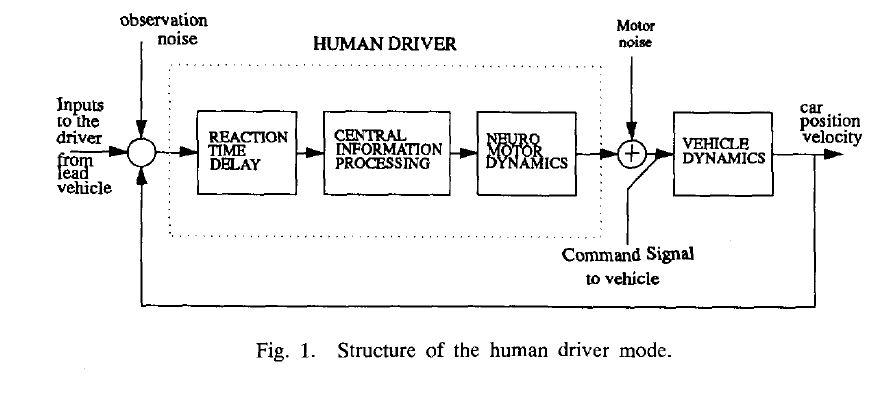
“Driver behavior in vehicle following has been an active area of research since the early 50’s. In vehicle following, the human driver acts as a controller. He senses velocities, distances, and accelerations and decides about control actions accordingly. In order to study these human control actions and their interaction with the vehicle dynamics, several investigators consider the development of mathematical models that mimic human driver behavior” (Ioannou and Chien 658). One commonly studied model is shown in Fig. 1. In this block diagram, note the Reaction Time Delay and the need for Central Information Processing and Neuro Motor Dynamics all of which slow the reaction time down and increase the possibility of an accident. With automation and good sensors involved with Autonomous Intelligent Cruse Control, this human reaction time is eliminated. This allows for safer inter-vehicle interactions giving you the opportunity to occasionally reminisce about those vivid memories.
Citations
Petros A. Ioannou and C.C. Chien. “Autonomous Intelligent Cruise Control.” In IEEE Transactions on Vehicular Technology, Vol. 42, No. 4, November 1993. Web. Site visited on 16 Mar. 2016. <http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=260745>.
Engineering Explained. “How Adaptive Cruise Control Works – Step One for Autonomous Cars.” YouTube. YouTube, 11 Nov. 2015. Web. 16 Mar. 2016. <https://www.youtube.com/watch?v=IMYi3G7dkU4>.
While I believe that the application proposed here makes sense, I am skeptical about the usage of technology for controlling driving purposes. When I began reading this article, I immediately thought of the (I believe Tesla) self-driving car where the passengers were playing chess with each other while the car cruised down the highway. Technology is advancing at a rapid pace, and this future is becoming more possible by the day, as evidenced by this article, but the idea of not paying attention to the road, especially with all of the disturbance variables that can be presented, concerns me. With that said, I believe that this technology is incredible, and would be very useful to a general audience. I’m skeptical about its ability to prevent accidents, but am nonetheless excited about the possibility!
Controlling the throttle and the brakes makes the most sense in terms of regulating speed. Outside of that, most of the process appears to involve calibrating the sensors and making sure that the information is being correctly processed so that the manipulated variables can be properly controlled. With speed of the car as the controlled variable, the only thing that would make sense would be to control the braking and the throttling of the car. These should be relatively easy to control, but my largest concern would be calibrating for all of the disturbance variables possible. Change in terrain as well as change in temperature are important things to take into account. Weather especially could have an effect on the cars sensors, especially if it’s particularly cloudy, and would need to be taken into account heavily. The largest concern of mine comes from other drivers on the road. Most people who have driven have experienced at least one “unfriendly” driver who has cut them off or tailgated particularly closely. In the situation of being cut off, the control would have to have a particularly fast reaction time to take into account the car that suddenly burst into the view of the front sensor. In addition, if there was a car following closely behind, such as in high traffic areas, a sudden braking could result in the driver being rear ended, another circumstance that we would want to avoid.
Due to these concerns, it would only seem logical that a PID controller be used to ensure that the reaction time of the controls are fast enough to account for the high paced action that is a typical highway. However, with the amount of information that would need to be processed by the sensor, there would no doubt be at least a little bit of noise that would occur in the signal. With a PID controller, this could cause massive problems. Were a PI controller to have a small enough feasible tau to react to the conditions of the road, this may be a viable trade-off.
This technology is very exciting, and interesting to consider moving forward! With the variable environment that is the highway system, however, I would be concerned with the ability of a controller system to properly navigate the landscape.
Control is a key portion of any cruise control system, but the intelligence of this system requires more specific and strict control. AICC is already being sold on the market in many car models. This cruise control methodology is both cost effective and feasible. Most major car companies have at least one model with this advanced car control. That being said, I believe Owen has a point in that this cruise control will not replace the need for some human control and is not a replacement for the human driver merely an additional safety feature.
Cameron and Tyler selected the speed of the vehicle and the distance between vehicles as control variables, but also conclude that they are nearly impossible to control by a single manipulated variable. Their manipulated variables are the pressure of the breaks on the wheels and the position of the throttle. These two changing values allow the car to control its overall speed and distance from surrounding vehicles easily. These do seem like the most effective methods for controlling the vehicles relation to all other things on the highway. The sensor for surrounding objects needs to calibrated just right and it should be noted that any disturbance to its calibration and location in the car would cause this system to be completely useless. The driver would need to understand that the control is not perfect and is not a substitute for them remaining an attentive driver. They distinguish a few disturbance variables including elevation and road type variation as well as changes in weather and therefore road conditions. An additional disturbance to consider would be things that could block the sensor on the car which measures distance from other vehicles. These could be things like snow, rain, or even just dirt. Really any substance that could block all or part of the sensor. This type of disturbance cannot be controlled for and it will probably require a physical human control of some sort, i.e. a small windshield wiper blade controlled by the driver.
There is going to be a complex control set-up but it definitely makes sense to use two sets of control and manipulated variables. This will definitely require a MIMO, I would suggest set-up number one where the break pressure is directly connected to the distance between cars and the position of the throttle is in-line with the overall speed of the car. All the controller parameters will require variable values which move along a sliding scale with increase and decrease in speed. This will make tuning the parameters more difficult. They will all be based on the 6 seconds between car value and set to change with changes in speed.
In an ideal world, this application would be perfect! If all cars had this system installed, the roads will be much safer, as cars would be able to sense each other and keep safe distances between each other. However, this becomes a bit more difficult when you factor in that not every car on the road will have this system installed. As a frequent driver of New Jersey highways and parkways, I definitely see the benefit of having this system for the times when people cut you off; however, I personally would not want this installed in my car, as I worry about the lack of human control. If a car stops in front of me and another one is closely following, I would prefer to swerve out of the way than to stop immediately and automatically and be hit anyway by the driver not paying attention behind me. Regardless, I believe this system is a great idea and has a lot of potential.
Setting the speed and following distance as the controlled variables makes sense for this system. As mentioned previously, you may also want to consider monitoring the distance of the cars behind and next to this car and develop a secondary escape mechanism (swerving into another lane) for when another car quickly stops in front of or cuts off the car. However, this may just need to act as a “fail-safe”, as correcting for this constantly could be more difficult to account for, especially if the car behind is traveling faster and closer than it should be traveling. Manipulating the pressure on the breaks and throttle makes sense to control these variables. These are the most-logical ways to manipulate the speed. Terrain and weather changes are good disturbance variables for this process. Someone cutting into the lane in front of the car would also be a disturbance variable. A feedback loop is a good control mechanism for this system in order to sense and correct for disturbances and other variables. This feedback loop must have a very quick time response though, and if the time response cannot be quick enough, feedforward may need to be added to correct for the disturbances more-quickly and more-accurately.
A PID controller with a small time response should be used for this process. This will allow for quick and accurate response to disturbances. While the derivative control will lead to some oscillations, these are acceptable in this circumstance, as you have noted, since speed limits and following distances have some range of acceptable setpoints. Finding tuning parameters and then testing at low-speeds in a controlled environment would be the best way to tune the controllers. Slowly building up speed and tuning further is necessary, as the controller parameters must also work when someone is driving way above the speed limit, as they will still be accustomed to the car adjusting itself if something were to happen.
I think this is a really interesting system to explore. My parents have a Cadillac SRX that I drive when I am home, and it has a similar system. I don’t often find myself using cruise control, but the car constantly monitors the distance between cars in front of it, and alerts you if you’re getting too close. This is really helpful (though sometimes a little annoying because the car beeps at me!) and I think it is a big improvement to the safety of vehicles. I don’t think the situation is as dramatic as Owen makes it out to be. While this technology can surely be utilized in cars that can drive themselves, I think that situation is an extreme application for this system. In standard use, like that exemplified by the Honda video, this technology will enable the “human time delay” that you see in standard, unequipped cars to be minimized, making the system safer. As for Danielle’s concern about lack of human control, while valid, I think because it will only slightly reduce your speed unless the car in front of you suddenly stops, there is not enough drastic action being taken that it could be potentially hazardous.
You have chosen the variables very well. It is important that you are seeking to control not only the speed, but also the following distance. While the two are interconnected, controlling only one would make the system unreliable and not as helpful. The manipulated variables were also chosen well, and I think, again, choosing to manipulate both the throttle and the breaks was perceptive. While it is true that variations in road type, elevation, and weather can all affect the controlled variables, isn’t the main disturbance the changing position of the car in front of yours? I’m not sure what you ended up choosing as your disturbance input, but if you don’t make it a sudden change from the car in front, where does that work into your process? Are you assuming perfect response from your sensors that will maintain the car at its speed and distance set points? Also, I’m not convinced that weather and terrain will have huge effects on your speed, barring anything like suddenly getting stuck in the mud (or vacationing vampires from the pacific northwest.) However, though the effects may be minimal, I think it was prudent to include them in your analysis just to cover your bases.
As far as selecting a type of controller goes, while it is important for the system to enact a fast response to be effective, I’m concerned that the nature of the wave-style input will result in pretty fuzzy data that could disrupt a derivative controller. I agree with Owen that a PI controller with a small tau or a larger gain could compensate for the slower response time due to lack of derivative control. Since there are many variables involved in driving, I think tuning the controller will have to be done via trial and error. However, I think general response times could be estimated for a basic set-up of the controller that would work in simple settings and could be fine-tuned over time.