(*) – This specification has some cross over with a design decision
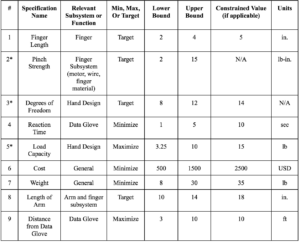
- The “Finger Length” specification describes the length of each finger which, in this case, will be the same for each finger outside of the thumb. Due to the goal of our hand to be as intuitive to control as possible, the finger length should be around the actual finger length of the workers using this hand. In order to attempt to design this “one-size-fits-all” type of hand, the finger length was determined by averaging the finger lengths of all of the team members. The average length range between all five fingers is roughly 2-5 in. so that will be the upper and lower bound for our finger length design [3]. This specification has little to no effect on our material choice. With relatively simple geometry, this specification should not affect dimensioning either.
- The “Pinch Strength” specification is the amount of force needed to pull the “trigger” of the sand blaster. The grip strength of the hand should also be enough so that the sand blaster does not slip out of the hand but also not so strong so that either the blaster or the hand itself is damaged. This specification requires a material that will not damage the or easily break when handling the sand blasters.
- The “Degrees of Freedom” is based on the number of independent motors that will allow movement in the hand. Each finger will have a minimum of 2 motors that will control from the base of the finger to the first finger joint and the control of the first finger joining to the tip of the finger. This will require 8 motors to be in use. The thumb will have a range of 2-4 motors to allow for movement to be made. This will mean that our total number of degrees of freedom will range from 8 to 12 [16].
- The “Reaction Time” is defined as the time it will take for the robotic hand to initiate movement after the initial movement was made in the data glove. In a perfect sense the robotic arm would move in real time with the movement of the data glove. Whether our robotic hand will be bluetooth or wired in there will be factors that will put a delay in the reaction time. We do not want the reaction time to be too large so that the person will make the movement in the data glove and stand there for too long before the robotic hand moves. Our upper bound is 10 seconds which is still high in respect to the actual value we hope to hit. [13] This specification requires the code to run somewhat quickly and efficiently. It has little to no effect on the physical aspect of our design, however.
- The “Load Capacity” specification is the amount of weight in pounds that our robotic hand will be able to hold. The goal for our robotic hand is for it to hold a sand blaster hose/nozzle and be able to squeeze the “trigger”. On average, a sand blaster blasts sand at 90 psi (depending on the type of sand blaster) and the hose for the sandblaster is around 8 feet [29]. The robotic hand will be mounted on a wall. The CFM is roughly 12 and the weight is 3.25 pounds just for the head of the hose (the sand blaster gun). With the hose attached and the sand coming out of the hose, it is estimated that the sand blaster will weigh roughly 10 pounds. [28]
- The “Cost” specification is the total cost of materials and components that will be purchased to develop the prototype. This value will reflect any components that are purchased and not used in the final prototype, but it will not incorporate the cost of labor/time from the shop technicians at Lafayette College. The goal of this specification is to minimize the cost as much as possible without sacrificing any of the product’s quality. The upper bound value has been set to 1500 USD. This value is based on how much the team has already spent (approximately 500 USD) and consideration of what still must be purchased for the prototype (motors, aluminum to be machined, etc.). We cannot exceed a cost of 3000 USD as this is the maximum budget that was set by the Department of Mechanical Engineering at Lafayette College. Setting the goal of having the cost remain under 1500 USD is significant as we must carefully budget our funds and consider the cost of each component before it is purchased. Additionally, this upper bound is important as one of the main goals of the group is to produce a low cost option to producers of denim clothing so that humans can be removed from the immediate surroundings of sandblasting procedures. In order to get producers of these products to invest in our solution, it would need to be of low cost to them to purchase and maintain.
- The “Weight” specification will consist of the total weight of the robotic hand, arm, breadboard and wires. The motors to control the hand will be placed inside the arm and our target number of motors is 10. Our goal motor voltage should be 12 volts per motor. The weight of a 12 voltage motor is roughly 110 grams, so the weight of the motors should be around 2.5 lbs in total. The Arduino breadboard used is roughly 79 grams which comes out to be just under 0.2 lbs. The weight of the wires used is roughly 0.06 lbs. The material that is used to make the hand will initially be PLA plastic, but then we hope to manufacture an aluminum hand/arm later in the semester. The goal weight of the PLA plastic is around 5 lbs. since the PLA will be used around the motors and wires, and the goal weight of the aluminum is around 11 lbs since the weight of aluminum in kg/cm^3 is just over 2 times heavier than PLA plastic. Therefore, the goal total weight of the robotic arm would be around 8 lbs if it were made out of PLA and roughly 14 lbs if it were made out of aluminum [36]. While determining the weight specification, we wanted something lightweight, but also something that would not break easily. The PLA plastic takes care of the lightweight aspect, but the aluminum takes care of the durability factor. This resulted in us deciding to initially prototype in PLA plastic, and the goal is to have an aluminum hand.
- The “Length of Arm” specification is the length of the appendage to which the finished hand will be attached. This measurement will be similar to that of measuring the length from a human’s wrist to their elbow, but the dimensions will not necessarily be the same. The goal is to achieve a target value of 12 inches for the length of the arm to which the hand is connected. This target value was found from measuring the length of team members’ arms from wrist to elbow. By using our own bodies as a reference, we can ensure that the hand and the arm that it is connected to are anatomically sound. There is no constrained value, but it would not be ideal to make the arm longer than necessary as it would then be more difficult to mount it to a surface for working with the sandblaster. The desire to design the length of the arm to reach the target value of 12 inches will have an impact on what the diameter of the arm will be. The motors that power the movement of the fingers will be housed inside of the arm, so it must be large enough so that all of the motors can fit inside and not interfere with one another [3].
- The “Distance from Data Glove” specification describes a wireless bluetooth system that has a 10 ft range. Ideally, one would want to be as far from sandblaster as possible for safety but there is a limit to how far wireless connection can go [24]. Silicosis is caused when workers inhale small particles of silica dust, which disperse in the air after the collision of the abrasive sand leaving the sandblaster at high velocities and the denim, so the further the worker can be from the location where the sandblasting occurs, the less at risk they will be [60]. The user should be able to operate the hand from at least 3 ft away, but must not be greater than 10 ft away, as the bluetooth transmitter being used in the data glove cannot communicate with the receiver on the robotic hand beyond this distance.