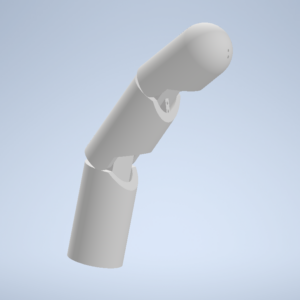
Similar to the human hand, the joints allow for an additional degree of freedom along the axis of the finger. Two finger joints will be placed on each individual finger and provide the precision needed to manipulate and work with objects.
TRL 1
As defined in the design problem statement our robotic hand project will include similar aspects to the human hand, including finger joints.
TRL 2
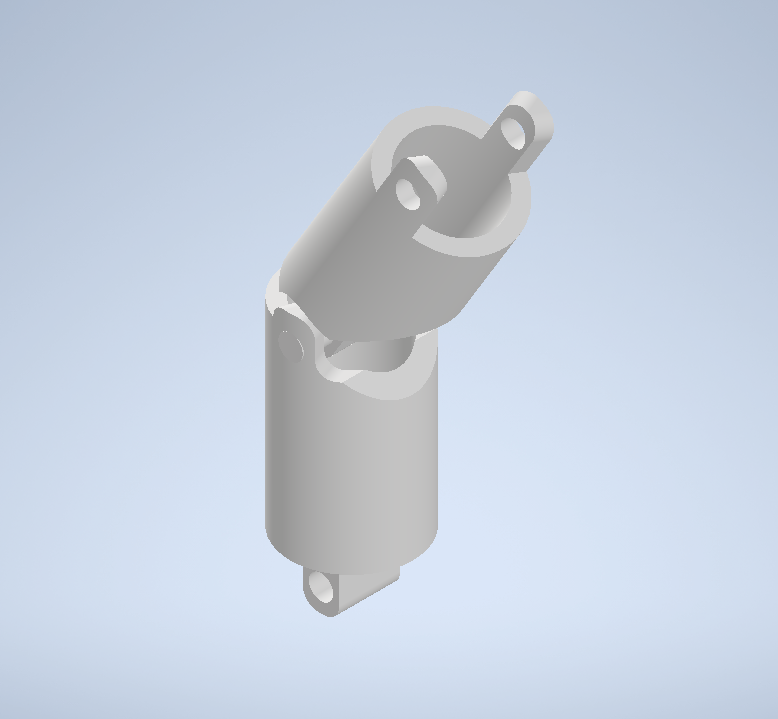
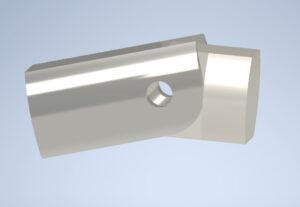
Similar to the knuckles the finger joints will include a pinned join that allows for full rotational movement within the boundaries modeled in the knuckle
TRL 3
A final design of a pinned joint between a tongue and grove was decided and is in preliminary CAD design, So far a looser, and tighter tolerance model have been drawn, and will be compared with 3D printed prototypes, before any metal fabrication is started.