Click here for Full Preliminary Lit Review
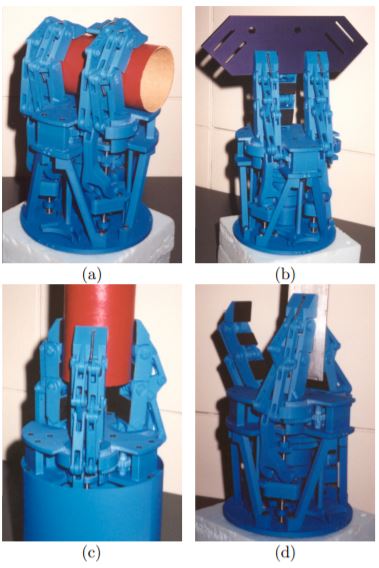
Three Claw Design with rotating claws
This robot claw has a very interesting and effective design. If we are to build a more claw type robotic hand, this is definitely something that we should look into. Relative to the other papers researched, this one has amazing diagrams regarding the geometry of each claw segment in order to maximize the grip strength and surface contact of each individual claw. The paper includes a valuable visual that compares the grasping force of the claw with the provided input torque. [11]
Hand design for space exploration
Space Robotic hand designed for space
This paper goes into more detail about the more dexterous and practical side of using robot hands in commercial applications as well as in space, this link goes more in depth about the dimensions and inner workings of the robotic hand designed to work in space. Multiple simulations of this robotic hand are run to see the amount of power it takes to grip an object with a certain amount of strength and it functions as a good baseline to work off of in the future. [12]
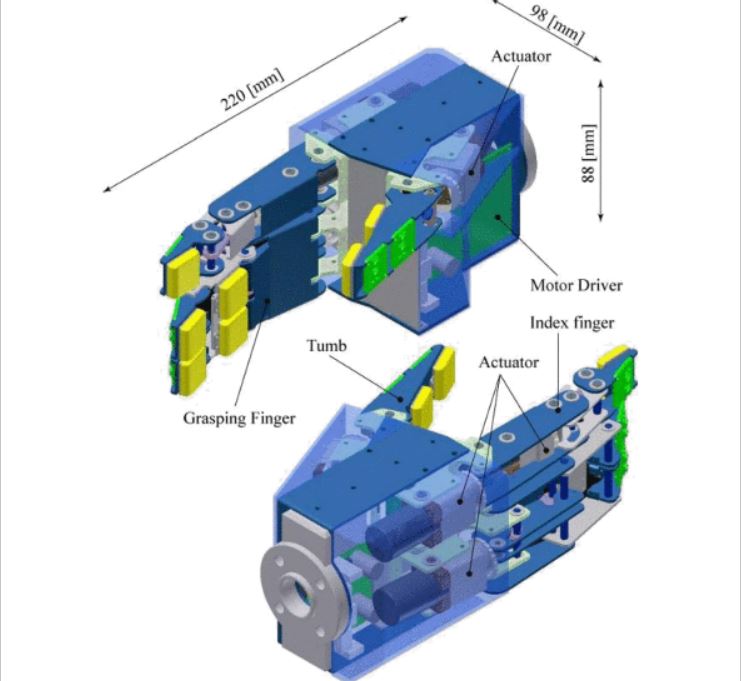
Metrics of prosthetic hand paper with design flow diagram
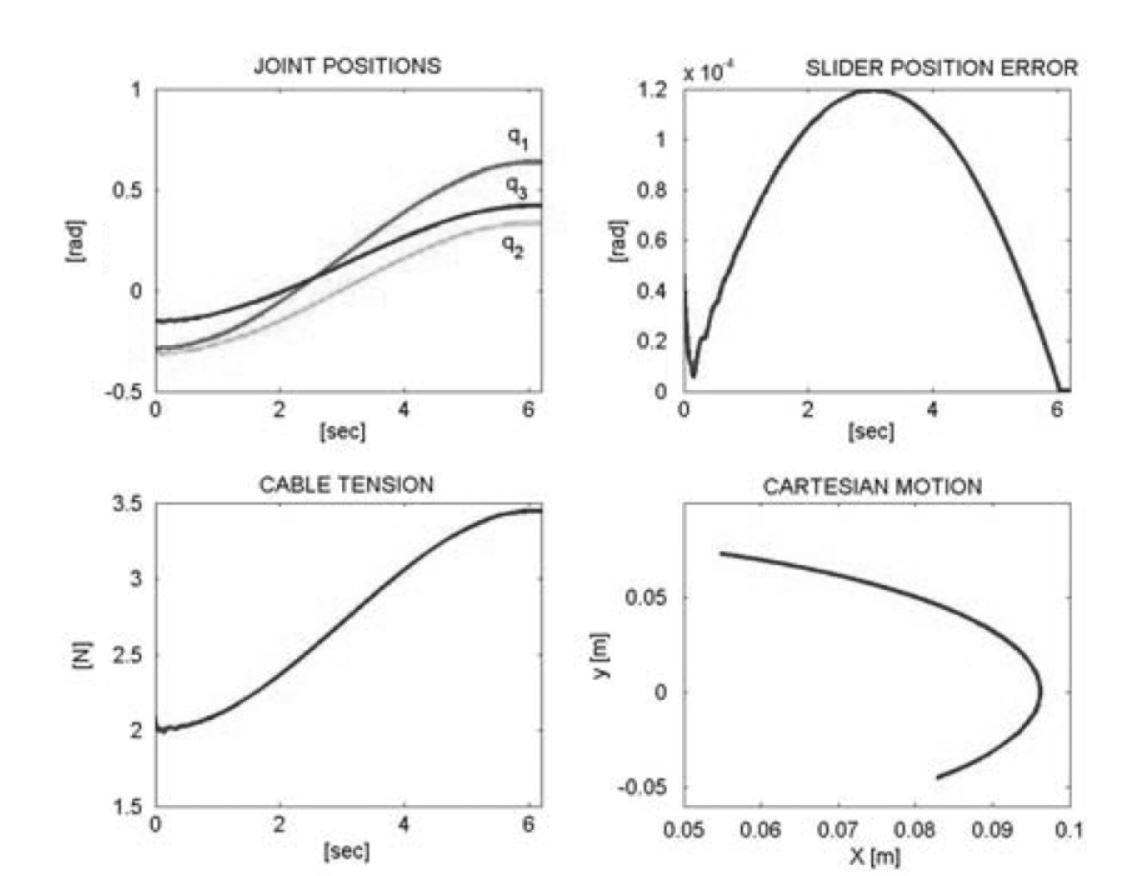
Plots of joint positions, cable tension, cartesian motion, and slider position error
This paper features a more prosthetic type hand design with three fingers (thumb, index, middle). It includes many important values for experimentation like the weight, dimensions, max grip strength at varying parts of the fingers. The time it takes to close and open the fingers is something important to consider as well. CAD models of the production and design process are included so those may be worth looking into too. The schematics, control systems, and equations used to design a prosthetic hand in this paper should most definitely be used in our own calculations. [13]
PID controller math and diagrams
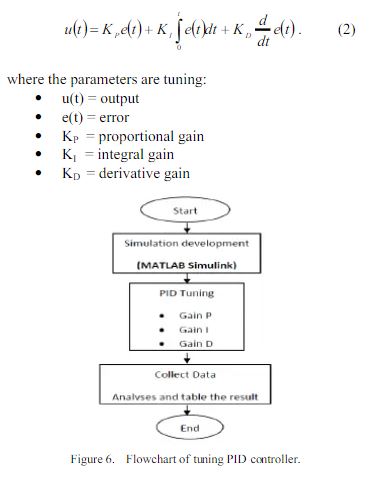
Tuning the PID controller
Although this may be a decent bit more complicated than the sources above, it still has it’s uses. It includes block diagrams of the PID controller that basically commands the prosthetic hand. There are multiple figures that go more into detail regarding the controller process and how it chooses how the hand moves. This paper has multiple useful equations to compute how the robotic fingers would work as well as transfer functions to validate how well the hand is working in general. [14]
Low cost and more affordable designs
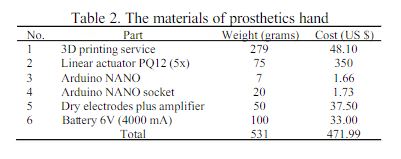
Table of costs for low-cost prosthetic hand
While less technical, this paper discusses more about the possible cost cuts of current prosthetics and making them more affordable to people living in developing or less developed countries. This paper still provides diagrams on how the hand would be designed ie: where to put the motors and cables, but the larger focus is on the best ways to keep it cheap and affordable without sacrificing too much quality. There are basic control diagrams to explain the basic function of the hand as well as multiple tables with materials to build the prosthetic hand out of (and their respective costs). [15]
Mechanical Design and Control Issues of a Dexterous Robotic Hand
In this paper from the University of Craiova in Romania, authors Berceanu Cosmin and Tarniţă Daniela discuss design and control issues of robotic hands, previous hand designs, as well as their proposed mechanical and control system design for a new dexterous robotic hand. The vast majority of robotic hand designs have been anthropomorphic, leading to difficulties relating to actuators, sensors, and controllers. Namely, the human hand has 19 degrees of freedom, meaning a robotic hand would need at least 19 actuators to be truly comparable to a human hand. However, the authors of this paper explain that a “simple yet viable solution” is to reduce the number of actuators while retaining functionality. The design presented by Cosmin and Daniela consists of five fingers and palm with six actuators. Five of the actuators are used to power the fingers in flexion or extension and the last is used to rotate the thumb related to the palm. This is advantageous as the hand retains much of its functionality while the amount of actuators and complexity is reduced. The control system for the hand is based in Arduino and utilizes sensors for proximity and force. Overall, many design and control decisions need to be made when considering robotic hands, and one of the most difficult parts is finding the proper balance between representation of the human hand and amount and complexity of actuators, sensors, and controllers. [1]
A Soft-Robotic Approach to Anthropomorphic Robotic Hand Dexterity
Published in the peer-reviewed journal IEEE Access, authors Zhou et al discuss the value in utilizing soft robotics anthropomorphic robotic hand design. Soft robotics is a term used to describe the construction of robots using compliant materials. While soft robotic hands tend to be less complicated than more traditional ones, they achieve well in terms of human hand dexterity. Notably, these types of hands were most successful in object grasping exercises. The authors of this paper presented a design with 26 independent degrees of freedom, known as the BCL-26. The BCL-26 achieved high scores in different measures of dexterity, including grasping, thumb dexterity, and in-hand manipulation. The combination of high functionality paired with reduced mechanical complexity is fascinating, and could be very beneficial to pursue in this project depending on the application that is chosen for the design. [17]

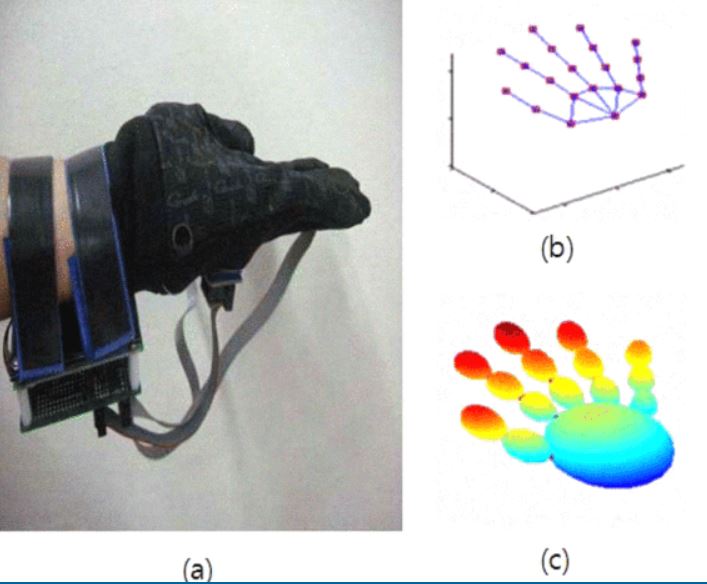
Data Glove with force sensor pressing rubber ball
This describes a fairly simple scratch-built data glove, made using a rubber-tipped cotton work glove, and commercially bought strain gauges. It includes exact specifications, which may be mostly useful as reference, and it includes block diagrams which I think will be more useful. [21]
Hand motion tracking using Data glove
Capturing motion of hand in 3D in simulation
This paper describes a design for a data glove that uses 3-axis accelerometers to read and measure hand motions. The paper discusses the problems with force-sensor based data gloves, like the one above, as well as the difference between data gloves that use video tracking, and data gloves that use motion sensors like accelerometer or gyroscope sensors. [22]