Objectives
- Used in the textile industry
- Replaces human hand in manufacturing where injuries are likely to occur
- Delicate enough to handle small objects/soft fabric
Design Decisions
- Utilize flex sensors and force sensors on data glove
- Motors drive cables for movement
- PD controller for finger position
- Made of aluminum and some plastic for flexibility and strength
- Use Arduino to control initial design with wiring before moving to wireless
- Data glove fits on five finger hand
Metrics and Constraints
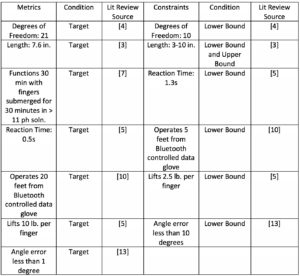
Degrees of freedom were modeled off of an actual human hand and how the fingers actually bend. We want our robotic hand to act like a human hand as much as possible in the textile industry. The desired length is the average length of a human hand so that corresponds with us wanting to create a robotic hand as similar to a robotic hand as possible. The robotic hand will be able to be put in very basic solutions to help avoid injury and minimizing risk for humans. Reaction time is based off of efficiency in the workplace. It should also act as similar to a robotic hand as possible. The distance from the data glove is inspired by the safety issues that arise in the textile industry. The user should be as far away from danger as possible. The weight and angle error were also designed to be as close as a human hand as possible.
If all the metrics are not met or if the time/weight is slightly off from our intended goal, we will assess what we have done so far for the robotic hand/glove and adjust it as it is being manufactured. From our viewpoint this early in the year, we have an idea of what we would like our robotic hand/glove to look like but we are assuming we will run into problems while manufacturing or wiring the robotic hand and those problems will allow us to formulate a solution we intend to move forward with. Obviously we do not have any problems now considering we have not started manufacturing anything, but we know problems will arise in the future and when they do, we will adjust accordingly.
The objectives, metrics and constraints come are based off of the codes and standards of both Lafayette College and government organizations. These allow for us to have a safe working environment while also giving us a guideline to follow.
The safety rules below are the standard of Lafayette College. All of these rules must be followed in order to design and manufacture in a Lafayette facility.
ME Safety Rules and Procedures Rev 2.0
This set of regulations is set by OSHA and outlines the safe operations and use of robotic and robotic systems. This must be followed in order to be compliant with government regulations.
https://www.osha.gov/enforcement/directives/std-01-12-002
https://www.osha.gov/sites/default/files/publications/OSHA3514.pdf
https://www.osha.gov/robotics/standards
This standard is set by the American Society of Mechanical Engineers and is used to make sure that the robotics being produced are meeting the safety requirements of this association.
This set of standards is set for the safety of using machines. If followed correctly it ensures that no injury will occur while using a machine to produce a part.
https://www.machinesafetyspecialists.com/u-s-safety-standards/list-of-machine-safety-standards/