There are several different options on the market for wheelchair users to either have motorized wheelchairs or to add assistive technology to their wheelchairs to aid with mobility. Motorized wheelchairs constrain a wheelchair design in terms of cost and accessibility related to bulk and weight of the wheelchair; therefore, wheelchair attachments try to mitigate the major drawbacks associated with motorized wheelchairs. Wheelchair attachments, often referred to as mobility add-ons, are defined as “relatively small and lightweight accessories for manual wheelchairs that increase the chair’s mobility capabilities, which can be easily removed when not in use” [5]. There are significant gaps and opportunities for growth within this market to provide better opportunities and experiences for wheelchair users. Even with all the innovations occurring in wheelchair design, many users still experience difficulty associated with current wheelchair technology for daily usage [7]. Research was conducted to examine current wheelchair add-ons on the market and where improvements could be made. This research provided motivation for the team to provide a lightweight, low cost, accessible, safe, and easily transportable add-on device for a wheelchair to assist a person to ascend inclines and descend declines and helping to improve their quality of life. The assistive technology or add-ons currently available for wheelchair users traversing slopes fall into three main categories: push rim-activated power-assist wheels (Figure 1), wheelchair power drives (Figure 2), and mechanical advantage devices (Figure 3) [8].
Figure 1 Pushrim-activated Power Assist Wheels (PAWAW) [9]
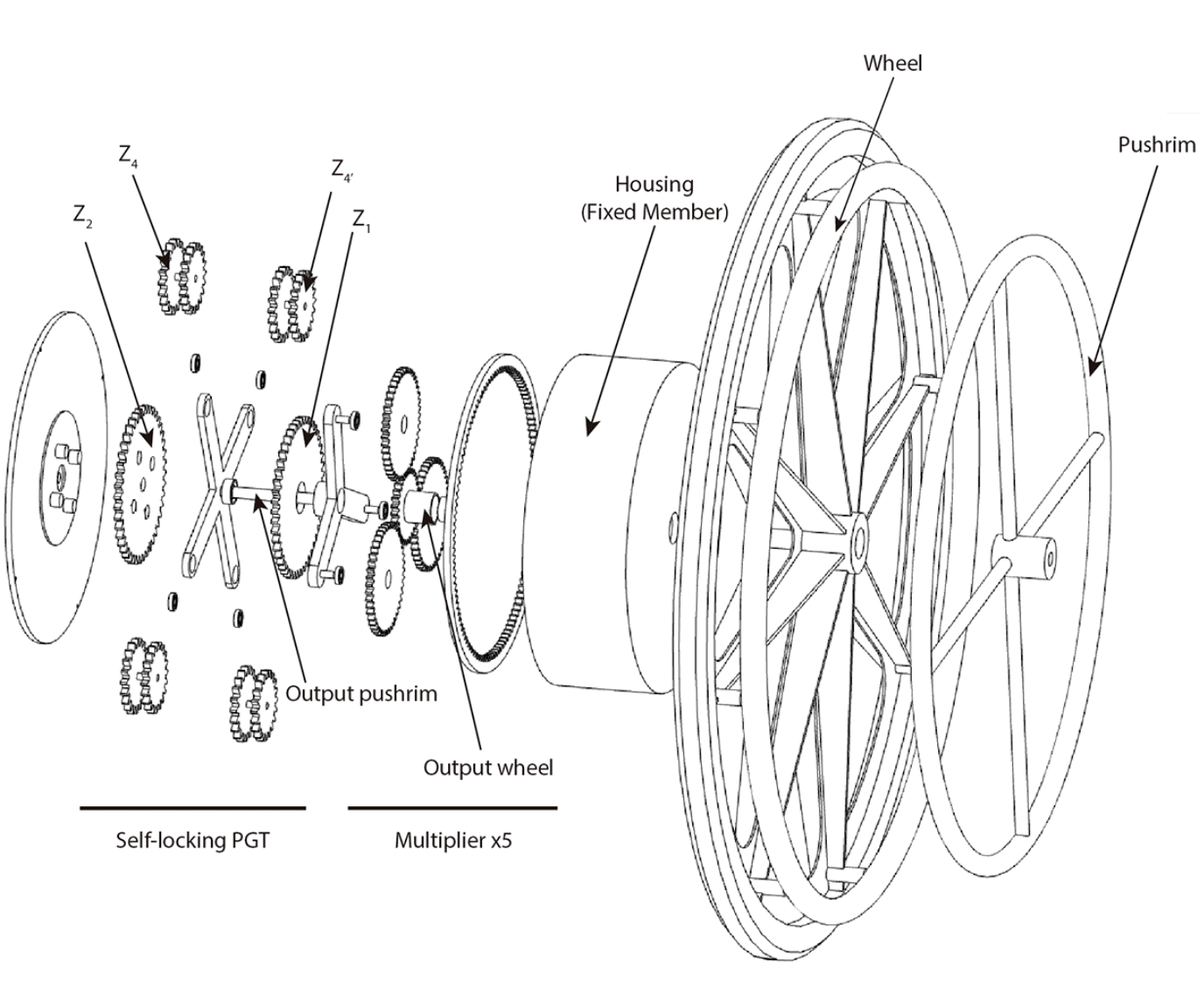
Figure 2 Wheelchair Power Drives [10]
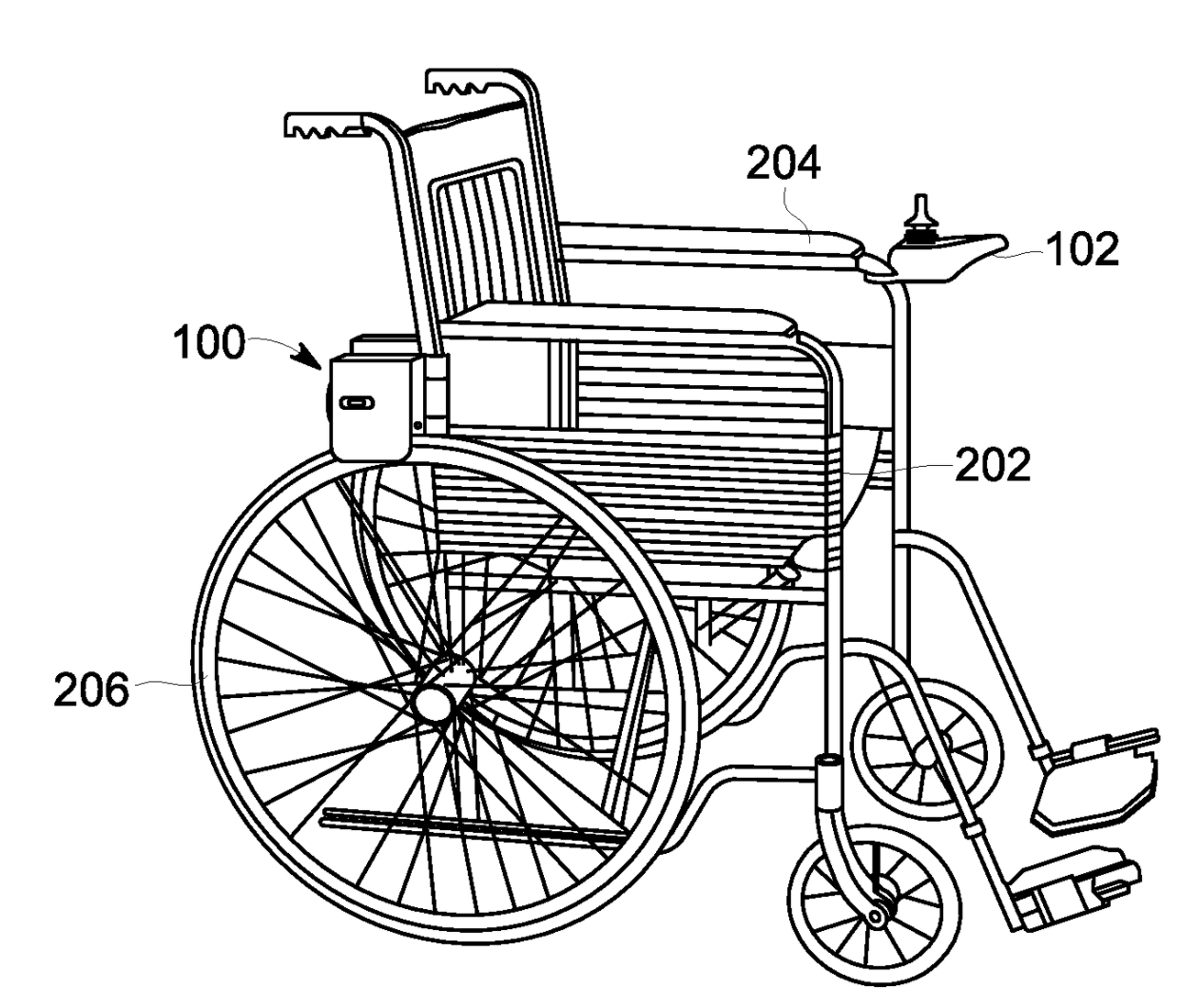
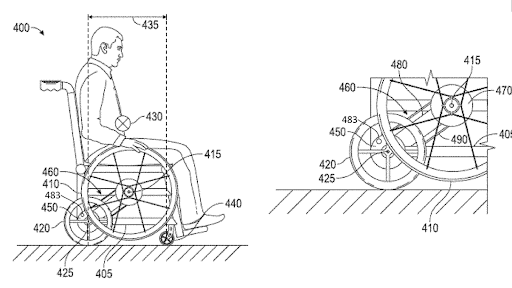
Figure 3 Mechanical Advantage Add-on [11]
Pushrim-activated power-assist wheels (PAWAW) is a manual wheelchair to which motorized wheels are added to provide power and aid with mobility [12]. Essentially, a person uses their hands to propel the wheelchair and the motors in the hubs of the wheels respond to the torque created by the user. This allows for the user to have the ability to propel themselves further forwards or backward with one push than with a generic manual wheelchair. One of the issues associated with the use of PAWAWs is that the overall width of the wheelchair is increased due to the addition of the small motors in the hubs of the wheels. Added width contributes to accessibility issues for the user. Lastly, the transportability of the add-on is often challenging and requires the add-on to be lifted if removed, which is sometimes not possible [12].
Wheelchair power drives consist of three main components: a control unit, battery pack, and a drive unit. Wheelchair power drives include two main types of controls: user-controlled and attendant controlled. User-controlled means operated by the user and attendant controlled means operated by an attendant or helper to the user in the wheelchair. The biggest disadvantage of wheelchair power drives is the weight the add-on contributes to the overall weight of the wheelchair mainly due to the battery [8].
Finally, there are simple mechanical advantage devices. The main advantage of this type of device is it is lightweight due to the absence of a battery and motors. This propulsion device uses levers to propel a user forward and backward. It reduces the overall effort of the user, but could potentially create muscular strain for the user from operation [8].
There has been a patent granted for a device that falls under the category of a user-controlled power drive that converts a manual wheelchair into an electric wheelchair [10]. The device includes the following components: a joystick, a communication unit, a motor, a retractable friction roller, and an engagement unit and power source. This device mitigates issues seen with electric wheelchairs including cost, portability, weight, and structural bulk [10]. Identified issues of the device include installation with the user needing to be in or out of the chair as the add-on is being installed or removed from the wheelchair.
Taking a look into the current motor assist devices on the market the below table (Table 1) shows four products currently easily available. The four devices, the SmartDrive MX2 Power Assist [21], Firefly 2.5 [19], E-Motion [20] and SMOOV One [22] are broken down into their prices, added weight, maximum supported weight, range on full battery, and maximum speed. The Smart Drive MX2 Power Assist attaches to the back of the wheelchair and has a single wheel to propel the wheelchair [21]. Similarly, the SMOOV One attaches to the back of the wheelchair with a single wheel and motor in a slightly different configuration [22]. Conversely, Firefly 2.5 attaches to the front of the manual wheelchair and has a similar steering to an electric scooter or motorbike [19]. The E-Motion replaces the wheels of a manual wheelchair and uses hub motors and other technologies to assist in propulsion. These different values heavily influenced the metrics and constraints of the device, as shown below in the associated section (Section 5.1), consequently affecting design choices and considerations.
Table 1: Pricing, Weights, Range and Speeds of Different Wheelchair Add-On Devices currently on the market
| SmartDrive MX2 Power Assist [21] | Firefly 2.5 [19] | E-Motion [20] | SMOOV One [22] | |
| Price (USD) | $6,317.90 | $2,595.00 | $2,595.00 | $6,895+ |
| Added Weight (lbs) | 13.5 | 35 (shipping weight) | 22 | 16 |
| Maximum Supported Weight (lbs) | 331 | ~ | 286 | 310 |
| Range on full battery (miles) | 12 | 15 | 15.53 | 12 |
| Maximum Speed (mph) | 5.5 (flat ground)
5.3 (6% degree incline) |
12 | 3.73 | 6 |
Many of the conceptual drawings and designs were inspired by prior art from other technologies. The hub motor, Figure A.1 and A.2 (See Below) used in E-Bikes inspired a few designs, which can be found in Images and Videos (See Figures B.4, B.5, & B.6). This allows E-bikes to be pedaled while the motor is running [13]. The intent in the conceptual designs is that the hub motor would allow the wheel to spin while also being pushed by the user. Other designs have been influenced by technologies outside of current motorized wheelchair prior art in addition to the prior art as seen in Images and Videos (See Figures B.1-B.3, B.7-B.11, B.13).
Ultimately, manual wheelchairs are a very inefficient form of transportation [8]. Just to traverse inclines or declines requires a significant amount of upper body strength and endurance [8]. Especially over a longer period of time, using a wheelchair can contribute to upper-body injuries including chronic shoulder pain [8]. The identified needs of wheelchair users coupled with analysis of current technology highlight the need for assistive technology that help wheelchair users navigate slopes. The major areas identified for potential improvements in the current technologies are cost, weight, accessibility, safety, and transportability while preventing the user from getting their hands dirty while operating the wheelchair. Wheelchair add-ons tend to be heavy, restrict accessibility, and costly, so the goal of the wheelchair add-on design is to combat these factors while creating an affordable and easily transportable product [8].
Figure A.1 Hub Motors used in E-Bikes [13]
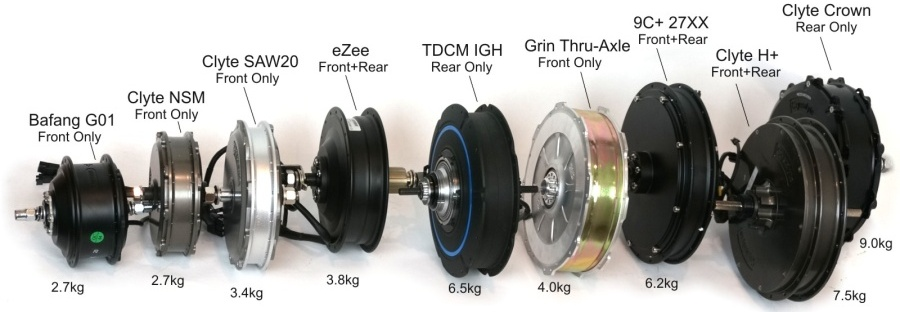
Figure A.2 Hub Motor in E-Bike Wheel [13]
