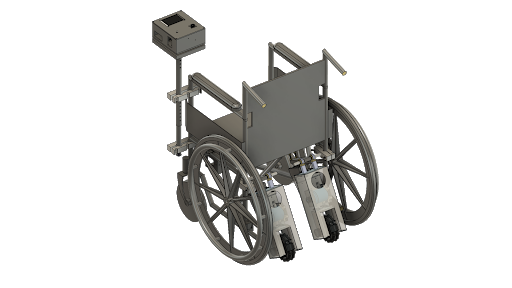
Figure 20 shows the current fully assembled prototype where all three subteams have integrated their components to create a device that meets our design goals of allowing for forward motion, backward motion, steering, measuring the effort of the user, eliminates sudden movements, and can interface with many common wheelchairs. With all three systems integrated together, the user can interact with the chair through the controller and effort sensing subsystem to control the motion of the chair. This controller interacts with the drive train through the motor driver which transfers information from the encoders to the arduino and transfers the commands from the arduino to the motors. The system battery connects to the motor driver directly and to the arduino and fans through a voltage regulator. The wires connecting the subsystems are zip tied to the poles on the underside of the chair to prevent contact with the user and the chair’s wheels. The two effort sensing sensors allow for the system to measure the effort of the user by measuring the propulsive force, and the angle of the wheelchair. The effort sensing strain gages are attached to the mounting poles of the drivetrain system. The accelerometer and strain gages interact with the arduino through the amplifier board located in the controller housing.