Summary
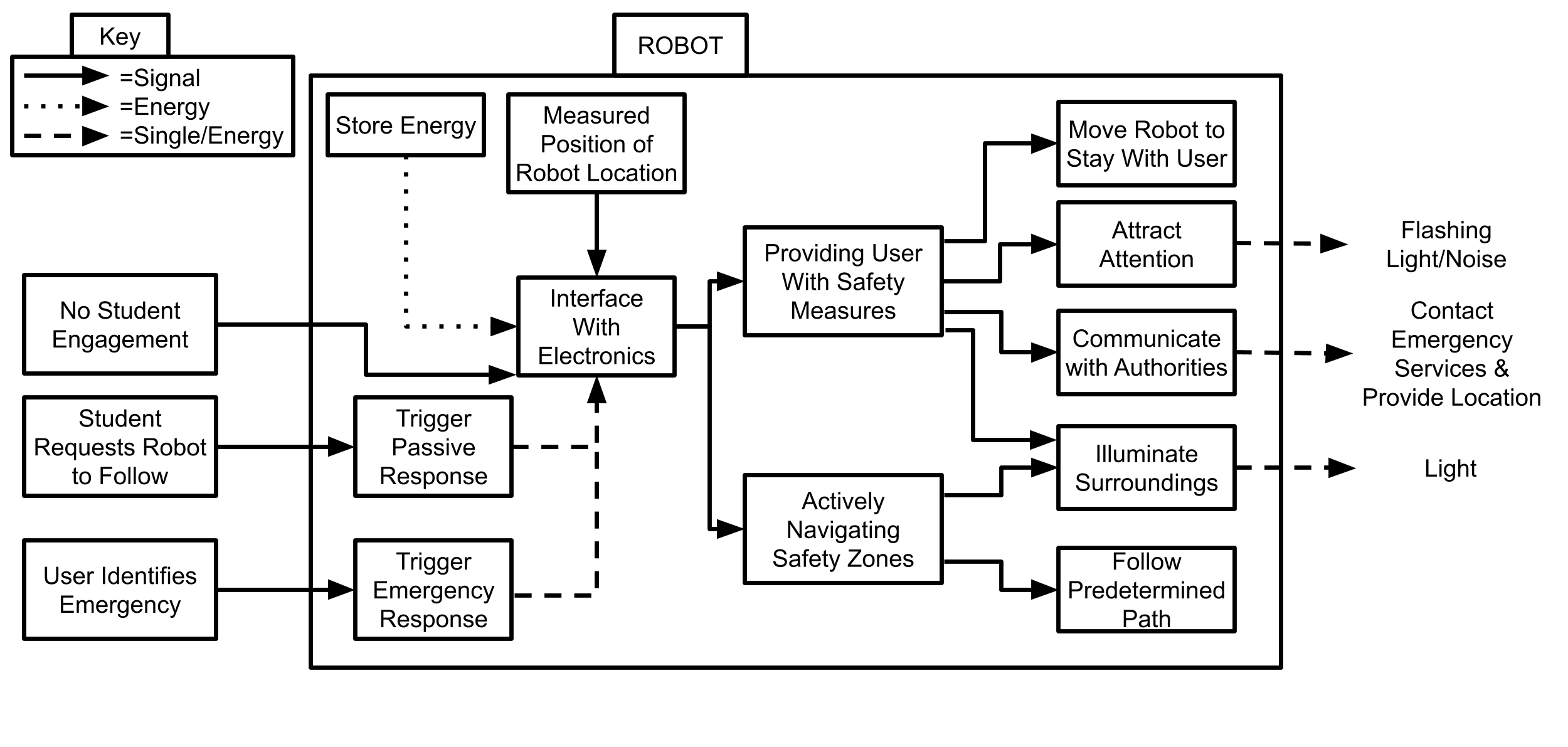
Since the solution that we hope to solve with our design project is to increase campus safety for students moving around college campuses, this is what our main inputs are. There are two different input scenarios, one represents a situation where our robot is passively assisting a person by just accompanying them, and the other represents a situation where a user feels as if they are in danger and the robot enacts its emergency services while accompanying the user. These inputs, along with the input of stored energy go into our “controller” or the device that we will use to control the electronic subsystems when they are needed. The key functional requirements that we developed are to illuminate the surroundings, move with the user, connect the user to help, attract attention to the user, and bring attention to the user, which all flow from our controller. The controller will be in charge of turning on and off the different safety systems in our robot. The combination of inputs and functional requirements and how they connect with each other result in a key output and help us to reach our goal of safety for individuals traveling on college campuses.
Functional Decomposition Diagram