In continuation of the Alpha Prototype and for development of the Beta Prototype, our team continued to work in three distinct sub-teams to generate Beta Prototype concepts. The structure team focused on the CAD and assembly of the robot. The electrical team focused on acquiring the necessary electrical hardware components and assembling a full circuit. The tracking team continued developing the tracking software while acquiring necessary hardware and implementing the system into the electrical team circuitry.
Structure
The structure team took results of Alpha Prototype surveys on body shape and color, as well as research on chassis design, and created a working CAD model of the Beta Prototype robot. Through multiple design iterations, the final CAD design of the robot resulted in a 6 wheel dual-motor design that enables tank-drive for movement.
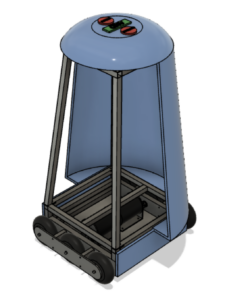
The structure team brainstormed various solutions for a body to fit around the robot and allow the design to meet the specified functional requirements. From painted bubble-wrap to sheets of plastic, the final solution by way of team vote resulted in a blue fabric that fastens around the robot with buttons, supported internally around the frame with circles of foam pool noodles.
Electrical
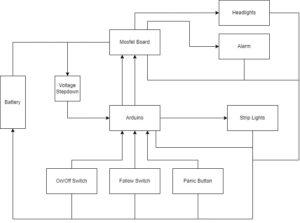
The electrical team, with theory support from their Alpha Prototype circuitry simulation, began purchasing electrical components and building the circuit. With advice from professors on best practices for assembling and implementing the electrical circuit into the robot, they formulated a final solution with two batteries supplying power to the motors and a third battery supplying power to the remainder of the electrical components.
Tracking
Adapting with issues that arose from the initially chosen YOLO software, the tracking team shifted to enabling TensorFlow Lite controller systems into their tracking. They purchased necessary electrical components, such as power-distribution boards and Raspberry Pi processors, and began designing a controller system that would integrated into the robot’s electrical circuitry. Check out a video of the initial stages of the tracking implementation here!