When examining our functional prototypes and goals, we noticed we had three distinct categories. There were requirements related to the physical chassis of the robot, the electrical system of the robot, and the ability of the robot to track a user. Therefore, the team divided into three groups, each with the goal of making a prototype testing a primary functionality of each subgroup.
Structure:
This subgroup further divided into a study on button panels, body shape, and wheel base. The button group did an experiment using several different button
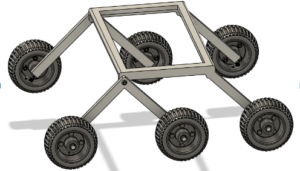
types and layouts in order to determine which resulted in the highest accuracy and response time when given a prompt. The body shape group did research into what shapes and colors result in viewers feeling the safest, and the wheel base group did research on how to design a drive system to get over bumps, curbs and other expected obstacles.
Electrical:
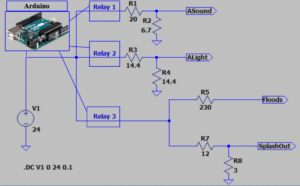 This subgroup worked on finding existing hardware to meet their functional requirements. Primarily, this consisted of finding a flood light, flashing blue light, siren, and a surrounding LED light strip that would meet our requirements. Secondarily, this group worked on calculating the voltage and power requirements for running everything on the robot, and designed a circuit capable of controlling the whole system.
This subgroup worked on finding existing hardware to meet their functional requirements. Primarily, this consisted of finding a flood light, flashing blue light, siren, and a surrounding LED light strip that would meet our requirements. Secondarily, this group worked on calculating the voltage and power requirements for running everything on the robot, and designed a circuit capable of controlling the whole system.
Tracking:

The tracking subgroup was tasked with determining how to track a user. This consisted of research into various methods of object tracking and deter
mining which were the most feasible. After examining multiple options, the group decided on the YoloV8 machine learning package, and proof-of-concept was pursued with a webcam and local Windows machine.