To generate concepts for the alpha prototype, our team divided into 3 subgroups. One group focused on structural elements of the robot, one focused on electrical elements, and one focused on the tracking system.
Structure
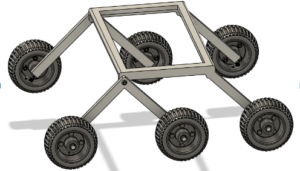
The structural group divided work into the robot body’s shape and size, the wheels and wheel base, and the user interface. The robot body shape concepts were varied among shapes with rounded edges, curved surfaces, and a mix. Images of generated concepts are shown below.

The wheels and wheel base concepts include a bogey which will allow the robot to better traverse obstacles, including curbs and tree roots.
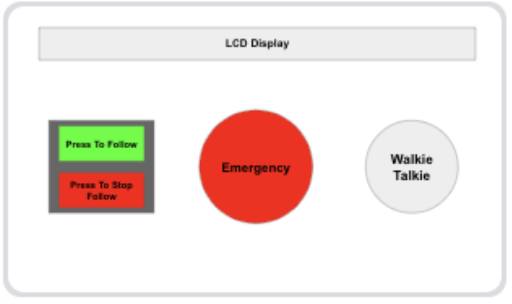
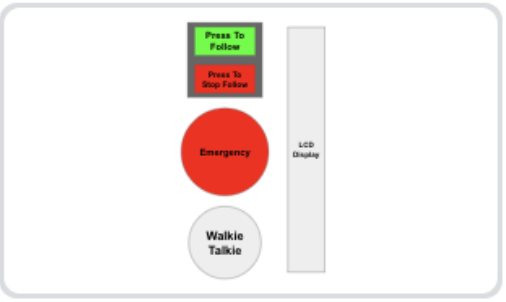
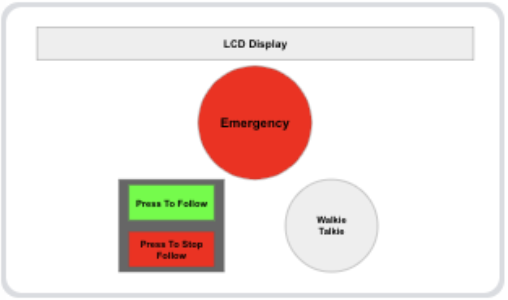
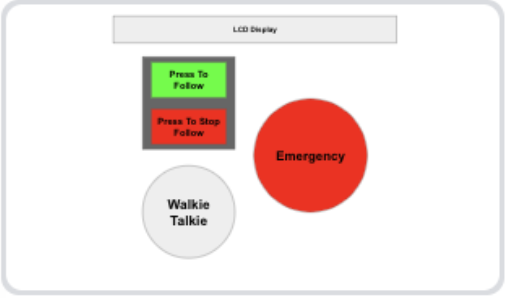
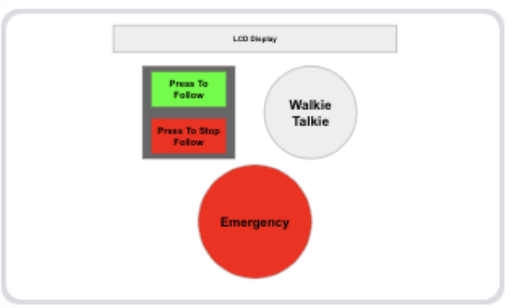
User interface concepts centered around a button panel, but there was significant variety. Concept images are included below.
Electronics
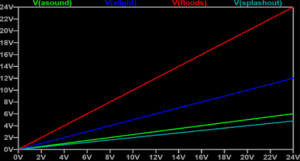
The electrical team divided focus into lights, alarms, and circuitry. Based on potential component power requirements, a feasible power source was found and the following simulation proved the maximum voltage was attainable.
Tracking
The tracking group manipulated YOLO open-source object detection software to prove the software could effectively recognize and follow human users. Demonstration of the software is shown here.