
Swim (MVP)
Quick Navigation
Purpose
Unprecedented natural disasters have recently been impacting world environments, Hurricane Ida being a recent example. The functionality to swim stems from the robot’s ability to navigate waters to provide aid to those stranded due to hurricanes and flooding.
Design Objectives
The primary objective of this sub-function is to be able to enable the robot to swim through waters to carry out beneficiary functions. In this case, the goal is for the robot to directly provide aid to users stranded due to harsh hurricanes, flooding, and other similar situations.
There are a series of propeller types that can be utilized for the purposes of the robot.
The Hamilton Jet
The Hamilton Jet works in relation to Newton’s Third Law – when a body exerts a force on a second body, the second body exerts a force of equal magnitude on the first body. Specifically, a water jet stream generates a reaction force in the opposing direction, propelling the hull forward.
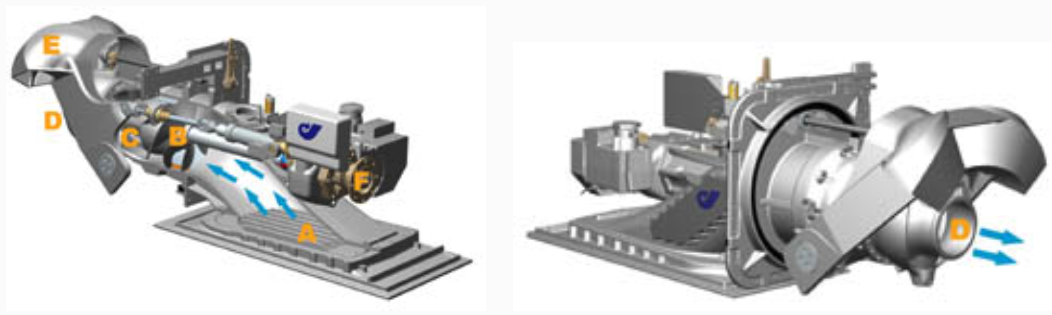
In the jet (as seen in the image above), water enters the jet via the intake (A) and is accelerated through the jet unit. The pumping unit (B and C) increases the pressure of the water flow. The high pressure flow is discharged at the nozzle (D) as a high velocity jet stream. The robot can achieve steering by changing the angle at which the stream of water travels as it exits the jet unit. The robot can reverse directions by lowering a deflector (E) into the water jet stream upon its exit from the nozzle.
Advantages to the Hamilton Jet
- Reliability – Includes few moving parts, increasing the life of most components upon the device.
- Precise Control – The steering nozzle is unique to minimize thrust loss when steering. This allows for efficiency and high speeds.
- Smooth Travel – There is a lack of hull vibration and torque effect with the Hamilton Jet, allowing the robot to swim through waters quietly and effectively
Conventional Propellers
- Fixed Pitch Propeller – Propeller and propellor blades are fixed in terms of their angle and motion as the robot navigates through the waters.
- Controlled Pitch Propeller – The pitch of the propeller and propeller blades can be altered during operation to influence the amount of thrust that occurs within the robot’s motion. It can also be used to direct the thrust backward to alter the orientation of the robot’s motion.
Technical Concepts
There is substantive fluid mechanics knowledge present within the “Swim” sub-function:
- Buoyancy – with regards to current submersible ROVs, syntactic foam is often used as a mechanism for supporting the weight of the robot and ensuring / maintaining neutral buoyancy in the water column.
- Bernoulli’s Equation – The thrust / force magnitude at which the robot is propelled forward is influenced by the pressure difference in front of / behind the propellor blade. Thus, Bernoulli’s Equation can be used as a means to calculate the force at which the robot swims forward.
There is some level of Systems / Physics-Based knowledge present within this sub-function:
- Newton’s First Law states that a body at rest will remain at rest / a body in motion will remain in motion unless acted upon by an external force – the robot will continue its swimming motion unless acted upon by a force (in this case may be an engine, propeller, water tide, wind).
- Newton’s Second Law states that the acceleration of an object is dependent upon the force acting on the object and the mass of the object – in this case, forces may include tides, wind direction, propeller thrust, etc that would influence the direction / speed of the robot’s motion.
- Newton’s Third Law states that when 2 bodies interact, they apply forces to one another that are equal in magnitude and opposite in direction – the propeller exerts a force on the water, causing the water to exert equal and opposite force on the propeller and pushing the robot forward / backward.
MVP Literature Review
There are many amphibious robots in development that are utilizing continuous fluid flow differential equations and computational fluid dynamics that show interactions between creature and fluid to allow primarily land robots to also traverse aqueous environments (Ren, et al., 2021). There are varying levels of research into the various underwater propulsion methods. The most prominent of which are propellers, water jet, BCF (body and caudal fin), and MPF (median and paired fins) propulsion techniques. Research into the benefits and disadvantages of each propulsion method will help to inform the team’s decisions. BCF and MPF are still very new research and therefore do not have much information. Traditional propellers are very well developed and have high-speed capabilities, but are noisy, have low maneuverability, and have high environmental disturbance (Ren, et al., 2021), thus making them not the optimal choice for the HARRT. Water jet propulsions such as the hamilton jet have high speed, efficiency, and are common therefore there is abundant research (Ren, et al., 2021).
Biomimicry is a typical structure for simple bionic amphibious robots. They largely fall into three categories: legged, snake-like, and salamander-like. These are simplified by limiting the DOF (degrees of freedom) of the robot (Ren, et al., 2021). However, in achieving true biomimicry the control system complexity increases drastically, as a result, there have been advancements in the study of hybrid amphibious robots that take elements from robotic design and elements from biomimicry to create an effective robot. These have been accomplished using various techniques: epaddle (which flips from leg to paddle), wheel-leg, wheel-track, wheel-leg-track (Rafeeq, et al., 2021). Nearly all of which are actuated using motors, but experience large discrepancies between their land and water movement speeds. These are powered most commonly by Li battery, NI-MH battery, undisclosed battery type, or external power source (Ren, et al., 2021).
Buoyancy control is another essential ability for underwater robots and vehicles to submerge and surface. A common method is doing a material exchange, for example, taking on ballast or discarding it. But that can be harmful to the environment and the organisms around making it not the best choice for HARRT (Baines, et al., 2021). A metal bellow device created based on the way sperm whales control their buoyancy is a more attractive solution to buoyancy control, operating using volume change. Other devices aside from the metal bellows device that could work are an electrical motor that moves pistons or a thermal glider that utilizes phase change of material to increase and decrease its buoyancy and pitch angle (Baines, et al., 2021). These all work on the mechanics of a control device that is used to change its own volume allowing the static movement up and down with thrusters/ jets, while remaining neutrally buoyant. The third suite of experiments concerns balance control when adding a weight to the robot. A common solution is the robot starts moving the battery autonomously to adjust the robot’s balance after a certain amount of time (Rafeeq, et al., 2021).
There are several gaps that HARRT can strive to fill. Many current amphibious robots cannot submerge, have poor agility on land, or require an external power supply. There are no well-defined robots that are able to use their limbs for dual functionalities. It would likely be very efficient to use a leg-like limb as a flipper in the water (Ren, et al., 2021). However, more prominently, there are no models that are able to balance both land and submerged water travel effectively. HARRT is striving to be successful in both.
As of now to fill the gap of water movement we’re on the decision that our robot will have two Hamilton Jets to help the robot move forward, backward, and directionally. To help the robot move upwards or downwards, we can use buoyancy. A major gap that comes from using Hamilton Jets is cost, especially if the decision is to have more than one Hamilton Jet. Also with the use of a Hamilton jet, we must account for the size of the jet. Hamilton Jets are relatively large so we must perceive a way to scale down a Hamilton Jet to the correct sizing for HARRT.
After identifying the various gaps in current research, the team has endeavored to design a modular solution that prioritizes environmental adaptability and mission objective flexibility. Research has shown that water locomotion tends to fall into four main categories: wheel, legged, undulating, or soft (Ren, et al., 2021).
Beyond hybridizing amphibious robots, robotic designs that take elements from biomimicry to create an effective robot seem as if it is the best option for HARRT. This would allow operators to use and maintain only one robot that can fulfill multiple purposes. For example, many current amphibious robots cannot submerge, have poor agility on land, or require an external power supply. By hybridizing an amphibious robot it would allow for a greater degree of flexibility and faster response time in a disaster environment. On the other hand, nearly all of which are actuated using motors, but experience large discrepancies between their land and water movement speeds increase in complexity trying to replicate biomimicry.
Metrics
Constraints
Developing the Design Space
As the project has progressed, the team has more clearly defined the bounds of our MVP. As part of those discussions, we decided to split the swim function into two sub-teams: the Propulsion sub-team and the Bouyancy sub-team. This would allow us to maximize team member efficiency by allowing us to tackle multiple problems simultaneously. Each sub-team has undergone a cyclic process of concept generation, selection, and refinement as part of their design process. Learn more about this process for each sub-team below:
Next Steps
- The most appropriate design must be determined by further fleshing out the above options, according to feasibility / current technical knowledge / team discussion and original concept generation.
- The Swim Sub-Team must be formed, and the selected design must be formally implemented utilizing 3D Modeling Tools, such as AutoCAD / Inventor.
- Begin building and machining!
Citations:
- Adam Conner-Simons | CSAIL. (n.d.). Soft robotic fish swims alongside real ones in coral reefs. MIT News | Massachusetts Institute of Technology. Retrieved October 4, 2021, from https://news.mit.edu/2018/soft-robotic-fish-swims-alongside-real-ones-coral-reefs-0321.
- Baines R., Fish F., Kramer-Bottiglio R. (2021) Amphibious Robotic Propulsive Mechanisms: Current Technologies and Open Challenges. In: Paley D.A., Wereley N.M. (eds) Bioinspired Sensing, Actuation, and Control in Underwater Soft Robotic Systems. Springer, Cham. https://doi.org/10.1007/978-3-030-50476-2_3
- Detweiler, Carrick & Sosnowski, Stefan & Vasilescu, Iuliu & Rus, Daniela. (2008). Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads. 429-438. 10.1007/978-3-642-00196-3_49.
- Explorer, O. (2017). What is an ROV? – oceanexplorer.noaa.gov. ROV Fact Sheet – Ocean Explorer. Retrieved October 4, 2021, from https://oceanexplorer.noaa.gov/edu/materials/rov-fact-sheet.pdf.
- Jet, H. (n.d.). Diagram of the Hamilton Jet that describes each individual component and it’s functionality. . How a Hamilton Waterjet Works . Retrieved October 4, 2021, from https://www.hamiltonjet.com/global/waterjet-overview.
- Rafeeq, M., Toha, S. F., Ahmad, S., & Razib, M. A. (2021). Locomotion Strategies for Amphibious Robots-A Review. IEEE Access, 9, 26323–26342. https://doi.org/10.1109/access.2021.3057406
- Ren, K., & Yu, J. (2021). Research status of bionic amphibious robots: A Review. Ocean Engineering, 227, 108862. https://doi.org/10.1016/j.oceaneng.2021.108862
- T. Inoue, K. Shibuya and A. Nagano, “Underwater robot with a buoyancy control system based on the spermaceti oil hypothesis development of the depth control system,” 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010, pp. 1102-1107, doi: 10.1109/IROS.2010.5653493.
- YouTube. (2009). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=vaK21IwB9C4.
- YouTube. (2016). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=BTis6GioP2g.
- YouTube. (2016). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=Hg-7yJGfdak.
- YouTube. (2019). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=fNNYUq5M-z4.
- YouTube. (2019). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=fNNYUq5M-z4.
- YouTube. (2019). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=ie76oAdD0RM.
- YouTube. (2020). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=2DoW0EXBIps.
- YouTube. (2020). YouTube. Retrieved October 4, 2021, from https://www.youtube.com/watch?v=CWulQ1ZSE3c.
 ᐧ
ᐧ