
The main function of the robot is to broadly assist operations in submerged environments and on rugged earth. It will assist through reconnaissance, two-way communication, and transportation of supplies.
Concept Generation
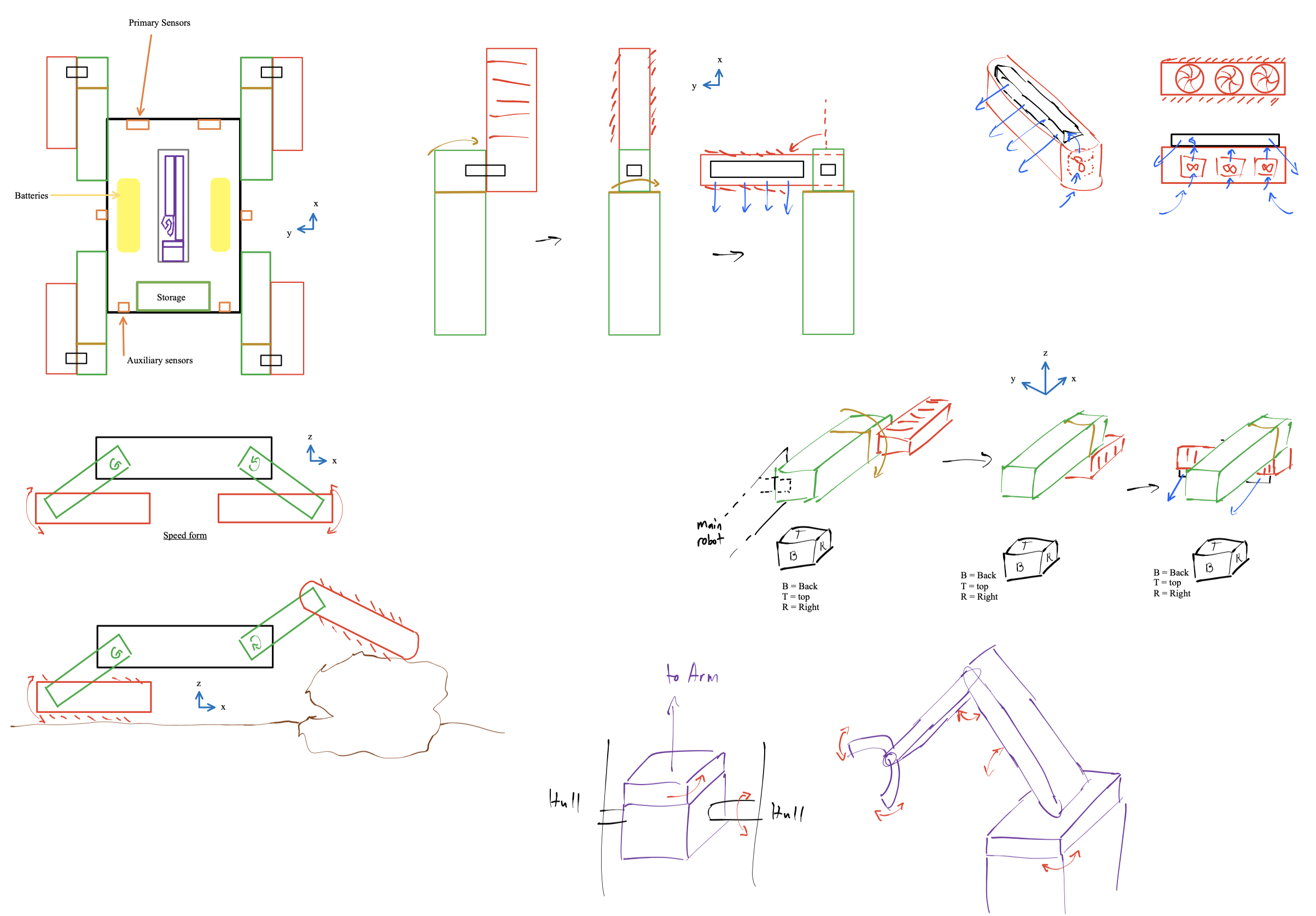
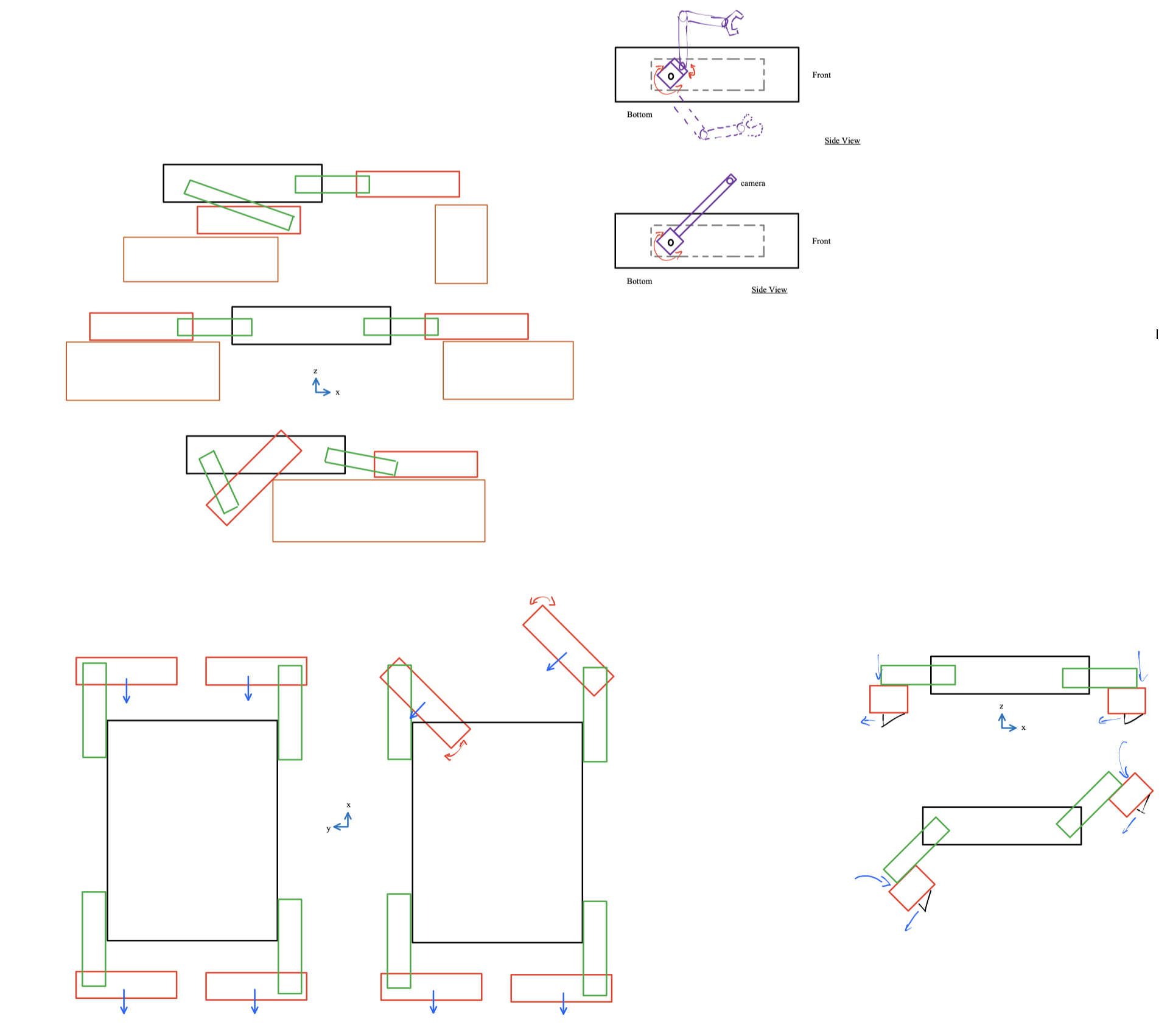
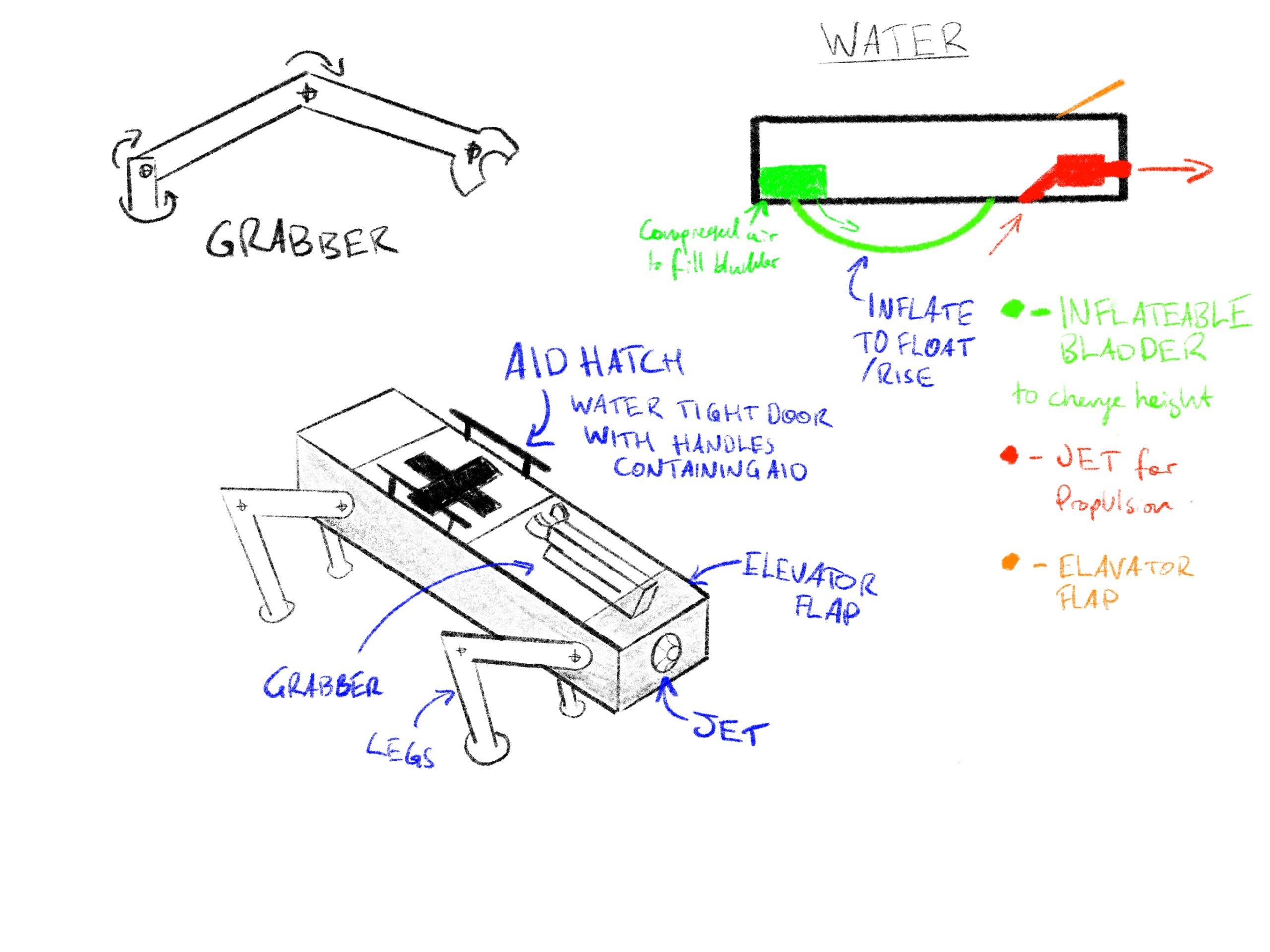
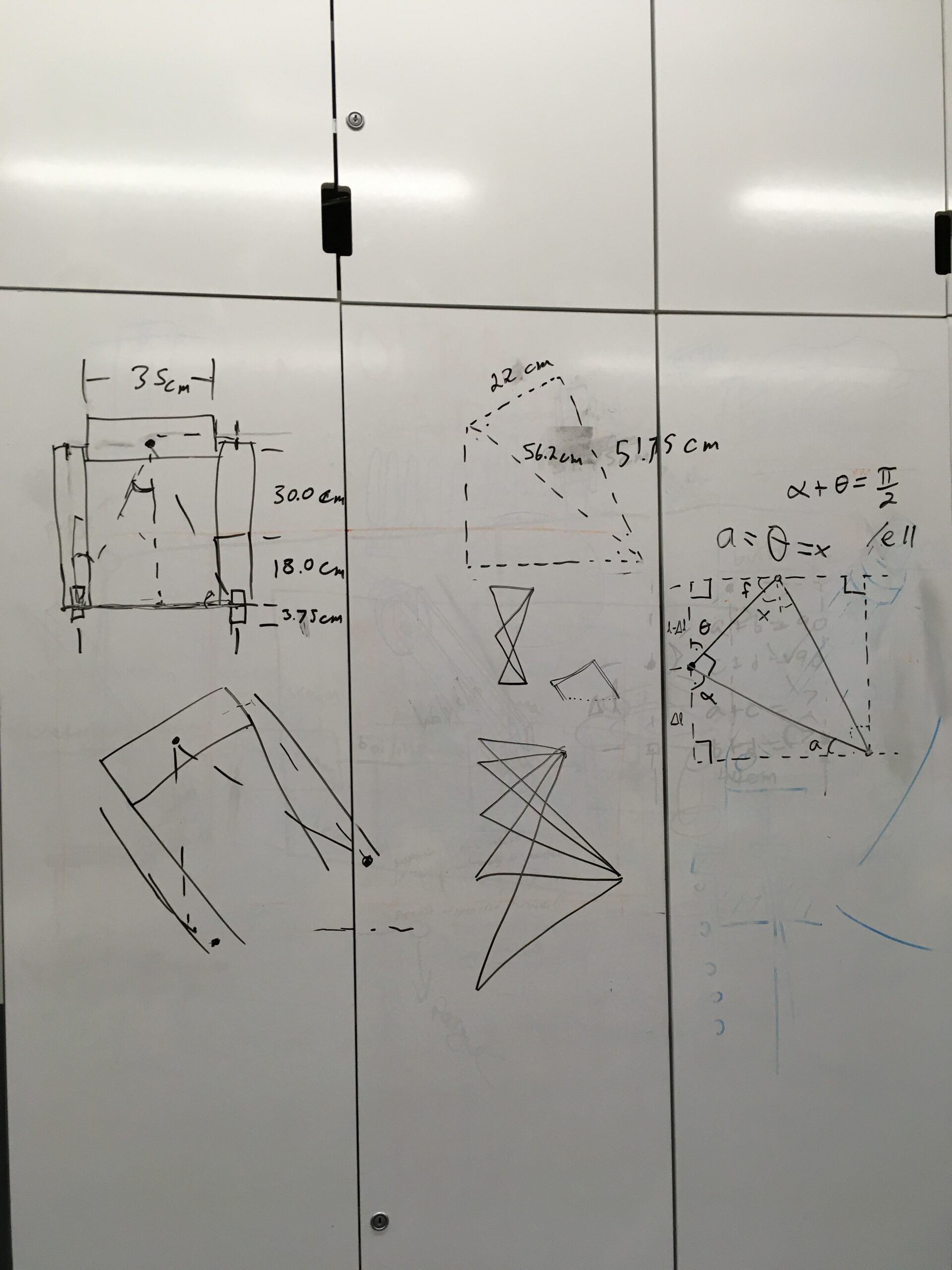
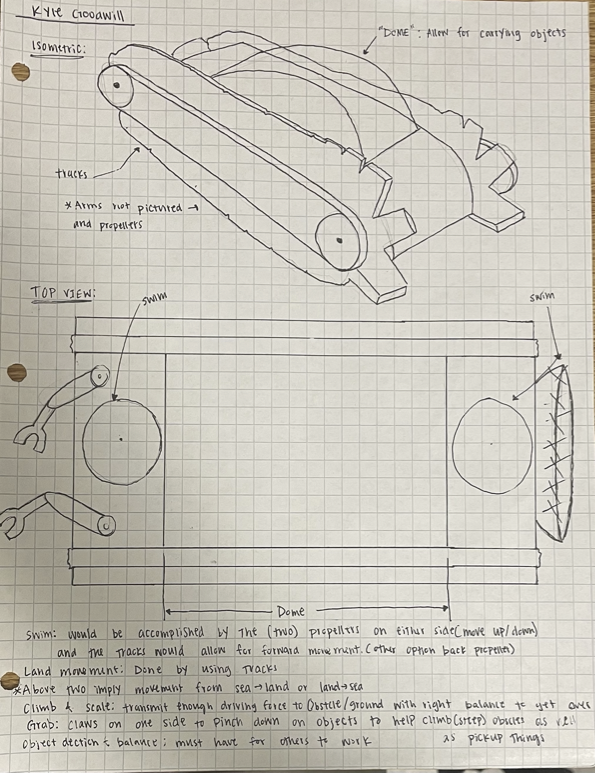
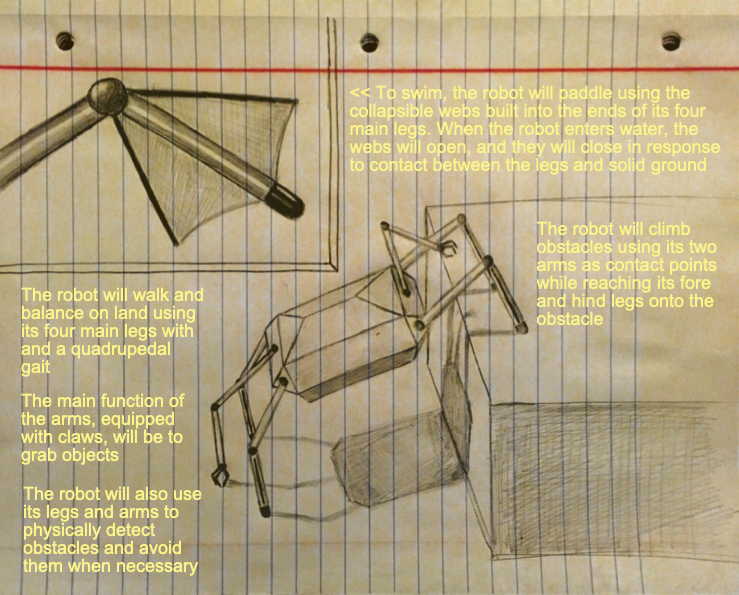
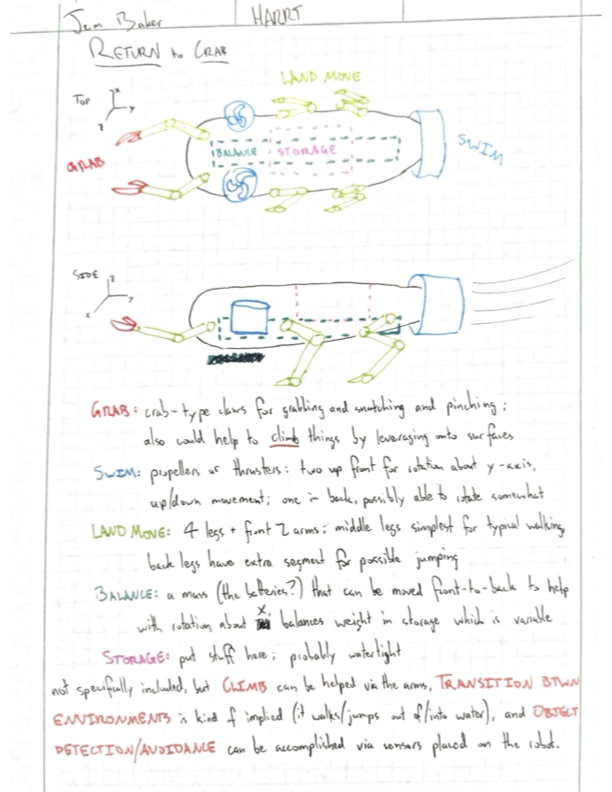
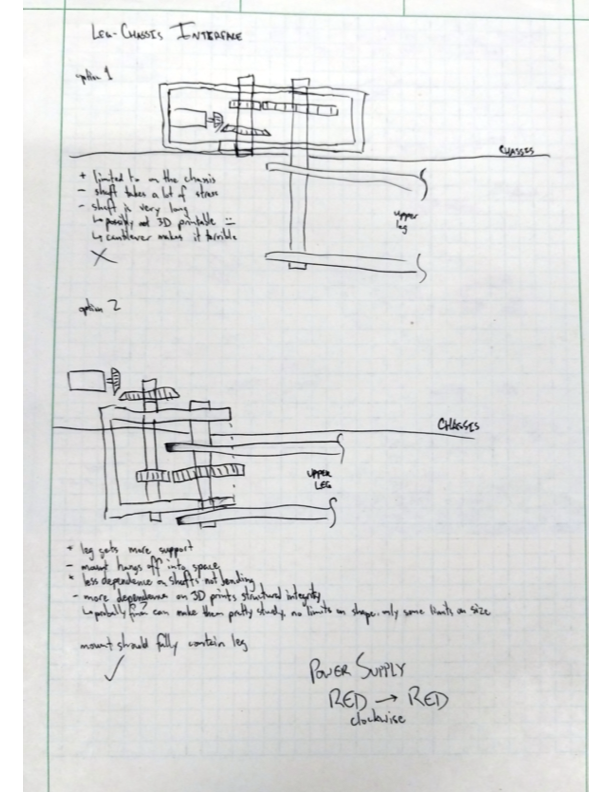
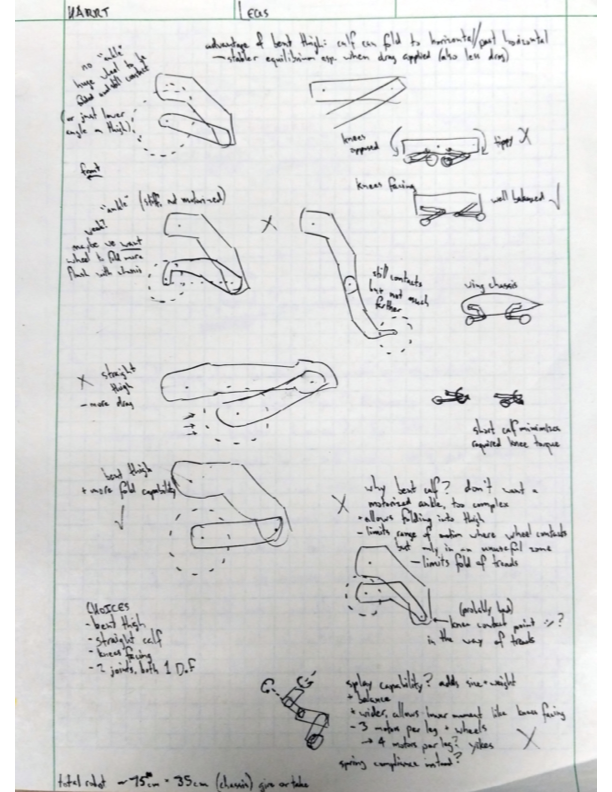
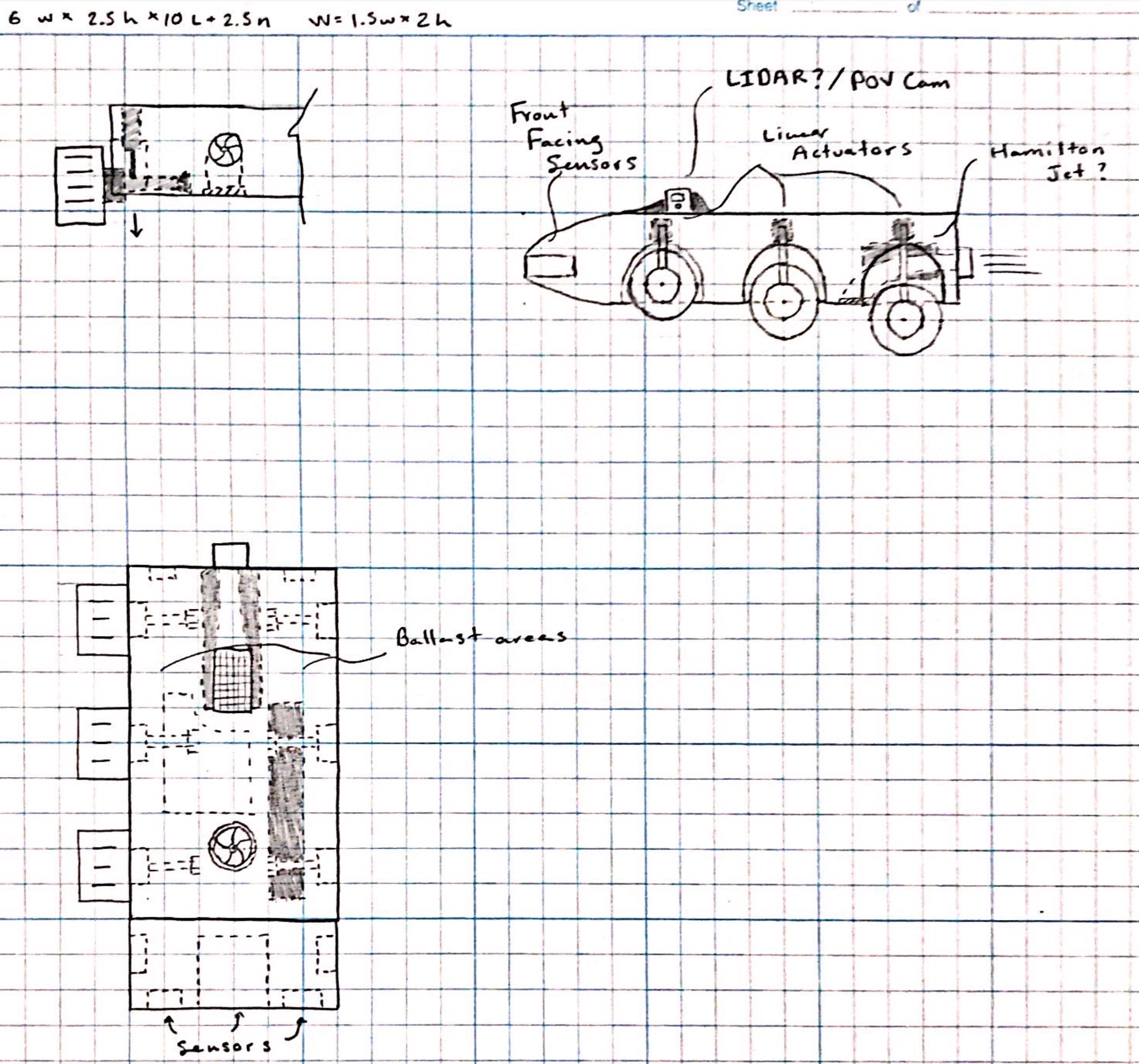
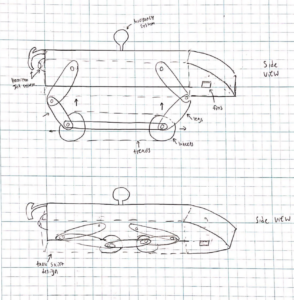
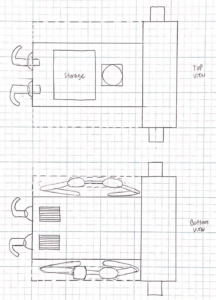
As elaborated on in Our Process, after selecting a general goal for our team, we began independently ideating unique designs that would satisfy our preliminary requirements. We then reconvened to share and eventually refine our ideas into what would become our MVP. Some of the concepts we created can be seen below.



Minimum Viable Product (MVP)
The HARRT Team’s goal is to design an amphibious robot that has the range of capabilities for a range of uneven terrains and hazardous applications. In order to achieve this goal, the team has chosen Water Movement and Land Movement as the foundation for the MVP.
The strengths of this MVP is the robot’s versatility in a disaster relief scenario. With climate change causing more severe and frequent geological events, it is incredibly important to develop technologies to better aid in disasters when human intervention may not be possible. The HARRT robot may also be more effective in combination of natural disasters which are becoming more prevalent with climate change. Additionally, it is beneficial to use technological solutions to these problems when possible as it aims to protect disaster relief workers and may allow for their energies to be focused elsewhere to allow for faster community recoveries from natural disasters. A major weakness of the MVP is that the robot will not be particularly proficient in any terrain. As the HARRT robot is made to traverse many terrains, it will not be the most efficient robotic design for any particular situation. However, the integration of many terrain capabilities into one robot makes it possible to assist in any situation, thus less preparation is needed by humanitarian aid agencies and a standardized model will suffice. However, the efficiency lost in traversing various terrains directly relates to time lost in search and rescue missions and could have a large impact when every second matters.
The Water Movement function requires a design that will assist the robot in forward and backward motion, as well as upwards and downwards motion. To guide the robot in moving forward or backward, a pair of Hamilton Jets will be designed (see more in the Swim section). To guide the robot in moving upwards or downwards, a buoyant design will be utilized (e.g. an inflatable and deflatable air sac). The Land Movement function consists of a hybridization of legs and wheels or treads. Specifically, the wheels are connected to the legs and act as the primary mechanism for motion; however, should the environment of deployment require it, these wheels can be swapped out entirely for treads. When in the tracked mode, a spar has placed between each set of legs to stabilize the robot’s system.
As the team progressed towards the robot’s final stages, the respective literature reviews for each function in the MVP were further developed. The literature views thus far can be found under the Swim and Land Movement pages. The ultimate concept selection for each subteam can be found here: Legs, Treads/Wheels, Buoyancy, Propulsion.
Covered Disciplines
Given the inherently multidisciplinary nature of robotics, our project requires an understanding of a variety of fields and disciplines. Fundamentally, essential mechanical engineering concepts including statics, dynamics and strengths of materials are necessary for constructing the basic structure of the robot. With its nautical component, various concepts from fluid mechanics are used to evaluate the performance of the robot, including Reynolds number, pressure gradients, boundary layer separation, and vortex generation. At higher levels, controls and mechatronics play a key role in providing life to the robot, involving feedback loops, Finite State Machines, and system modeling.
Defining Constraints and Metrics & Applying Codes and Standards
In any engineering endeavor, more than context to the problem is needed before a solution can start being drafted. Constraints are limits, often defined by the clients and future users, that restrict aspects of the design. These restrictions can set both maximum tolerances, minimum performance levels, and more; constraints must all be satisfied for the solution to work. On the other hand, metrics are additional parameters that help designers gauge how effective their solutions are. While it is not essential to meet every metric, an ideal solution would surpass many metrics set by the engineers. Similar to constraints, codes are widely accepted sets of rules and guidelines that describe what engineers must do for a given endeavor. While not intrinsically legally binding, they are set to improve safety, quality, and other industry practices. Standards supplement codes by defining specifically how to execute codes. These include documents for any required products, practices, methods, or operations and also help reduce production costs by building a standardized foundation for solution architects to build off of.
Click to learn more about how these apply to the team.
The Robot’s Functions

Use Cases
As an amphibious vehicle, this robot has been designed with the vision to enable remote operators to pursue their objectives safely, comfortably, and efficiently. As part of the robot’s exploration and reconnaissance features, the robot can be deployed around rocky islands, in river deltas, marshes, and swamps to collect data about the environment, interact with wildlife, or search for missing persons. In times of crisis, the robot may be used to search for victims in flood zones, able to dynamically transition from searching in underwater basements or garages to crossing recent mudslides to get to a new rescue area. Future environments also include those off-planet, potentially acting as a platform for robust semi-autonomous robots that can collect data from astronomical objects, such as Titan, or assist in habitat construction on Mars.
Image Credits:
Jarmolu, M. (n.d.). Robot arm technology – free photo on Pixabay. Pixabay. Retrieved October 5, 2021, from https://pixabay.com/photos/robot-arm-technology-robot-arm-2791671/.
Grabowska, K. (n.d.). Sign signs symbol – free photo on Pixabay. Pixabay. Retrieved October 5, 2021, from https://pixabay.com/photos/sign-signs-symbol-danger-safty-791333/.