Motivation
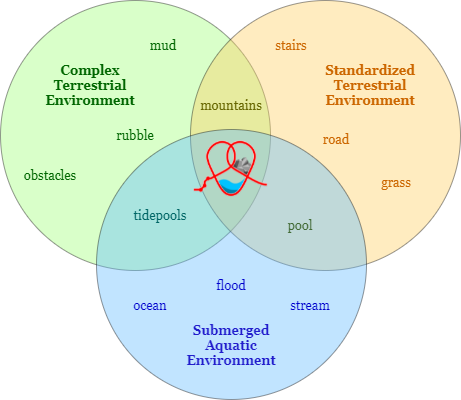
The goal of HARRT is to build on the current state-of-the-art research in amphibious robots by improving and balancing operational performance in multiple environments and by increasing mission objective flexibility. After conducting a literature review into land and aquatic movement types, the team identified that many amphibious robots tend to specialize in performance in either terrestrial or aquatic environments at the cost of the other. Even within terrestrial environments, locomotion designs are often focused on relatively standardized terrains, such as roads, grass, or steps in buildings, or are specially tailored for irregular terrains, including tide pools, rugged cliff sides, and rocky river beds.
Few designs are created for efficient operation in both scenarios. Furthermore, most amphibious robots focus on traversing aquatic environments by remaining at the surface.
Motivated by this apparent gap in functionality, HARRT aims to revolutionize amphibious robot technology through a design that balances performance across a wide range of terrains and by adding the ability to fully submerge and navigate aquatic environments. As a result, HARRT’s innovation would advance the field of engineering with the robot’s superior versatility and efficiency in traversing multiple terrains compared to its predecessors. As additional functionality, we set goals of enabling the robot to be able to store and transport supplies and feature a robotic arm to directly interface with itself and the immediate environment.
Impact
The main impact foreseen for the product is to improve the state-of-the-art of amphibious robots that aid victims stranded in submerged environments (e.g. hurricane, flooding) and on rugged earth (e.g. mountains, mud, grass).
With a robust and agile design, the robot will be able to transport supplies including food, water, and first aid to directly support those in need. Additional auxiliary purposes, such as real-time data collection, field maintenance, and debris clearing, can be fulfilled via the system’s modular and multipurpose design. We will achieve this impact by implementing the following functionalities:
- A Submersible design allows for the product to navigate into and through flooded areas with no above-water access, such as basements, under fallen trees, collapsed infrastructure, and garages.
- The ability of the product to move across land and climb and scale obstacles will provide the product with the ability to traverse and navigate hazardous or otherwise challenging terrain to perform reconnaissance or provide aid.
- Distinguishing it from typical patrol or survey vehicles, robotic arms will allow the robot to manipulate the environment directly and interact with itself, performing light maintenance (such as manually cleaning sensors) or changing cargo.
- Versatility must be a core tenet of the design and to accomplish this, the robot must guarantee an ability to move between rugged earth and submersible environments seamlessly and without assistance.
- Given the need for the robot to navigate through uneven terrain (e.g. rocks), the ability for the robot to balance is a key functionality to ensure that it maintains or otherwise returns to the correct orientation.
- It is essential that the robot can assess its surroundings and collect data. The usage of the data will be subject to the decisions made on the operations of the robot (e.g. whether the robot is able to autonomously avoid objects / provide some level of user feedback).
- A robot that can detect objects and autonomously avoid them would be useful to both the remote operator and field users, as it would remove the necessity for oversight from the operator and can be more effective in locating a user than a human operator.
- While an advanced AI system that makes decisions regarding the robot’s actions in traversing uneven terrain is quite beneficial, a human operator can complete exactly this with significantly fewer feasibility challenges. By implementing feedback in the form of proximity-sensing capabilities, the operator will be given a heightened sense of understanding of the robot’s surroundings and this ability would be greatly enhanced.
|
 |
Broader Impacts
Given the multi-purpose nature of our robot and its relation to budding research in robotics, it is imperative to consider the myriad of impacts our designs may have in various broader contexts.
The team chose to prioritize impact as a component of our solution, due to three critical facets of the solution. First, the team needed to understand how the work we were doing aligned with the broader state-of-the-art of robotics research. We wanted to design a robot that didn’t already exist, and would provide broader impacts to the realm of academia. Additionally, the team wanted to ensure that the robot’s specifications aligned with customer and societal needs. Listed below include the impact of our robot on various societal and economic contexts.
 Health Health |
As one of the founding goals of this project was to aid in disaster relief, this robot could save the lives of those affected by natural disasters, including hurricanes, flooding, and more. First responders and civilian support groups could employ this robot to investigate submerged homes or tunnels and boost their collective search radius. |
 Safety Safety |
One of the primary features supported by our robot falls under the categories of observation, surveillance, and reconnaissance. The robot can be remotely operated to enter hazardous environments, thus keeping the operators out of harm’s way. Example scenarios may range from flooded mines to nuclear reactors, not to mention various military applications. |
 Welfare Welfare |
This product will mainly contribute to the work done by the systemic support systems in our communities. Our robot will help during natural disasters which our firefighters, police, and health care workers serve on the front line. We hope to see our tax money go toward the production of our robot and other systems like it to aid our community heroes. |
 Global Global |
We hope to extend our product across the world. After all, the entire world is affected by natural disasters. While this product is intended to be produced in the United States and subsequently shipped to domestic and international consumers, we hope to inspire global collaboration on similar designs as part of the future robotic revolution. Similarly, one of the primary gaps in technology our product hopes to fill is to improve the current state-of-the-art amphibious robots that aid victims stranded in submerged environments, as there is a lack of robots that have both Land Movement and Water Movement functionalities. We hope to impact the work that researchers and general academia are performing all across the globe and bring the robots we envisioned for the future to today’s world. |
 Cultural Cultural |
As disasters can happen across the world at any moment, we must consider traditions, religions, and local events that may have an impact on the way aid is delivered. While engineers often are assumed to work solely within the technical aspects of design, we must consider how our products will be received by potential stakeholders. It is our responsibility to advise future operators of our robot as to what cultural environments this robot would be best deployed in. Rural and self-sufficient communities will react differently to remotely operated robots than urban and consumerist societies. Additionally, we must ensure that the aid provided can be understood despite potential communication barriers and that we will make accommodations for culturally specific social cues. |
 Social Social |
As an end goal of creating a robot that could aid in delivering disaster relief commodities and assistance in scenarios where personnel is sparse or otherwise limited, we have investigated the way in which social care must be delivered through aid. Future iterations must allow for equal support to children, adults, the elderly, or individuals with congenital impairments. Outside of relief applications, utilization of our robot will expose communities to another aspect of robotics, increasing familiarity, trust, and interest in robotics and general sciences. |
 Environmental Environmental |
While internal power is not currently included in the MVP, future iterations of our robot would likely feature the use of rechargeable batteries, likely of the Lipo type. While Lipo batteries are rechargeable, their component materials consist of heavy metals, which have heavy costs on local environments when mined and eventually disposed of. Application-wise, the robot could be used by researchers to help investigate remote islands and ecosystems, monitoring local environments and wildlife. |
 Economic Economic |
Robotics is rapidly becoming a topic of global interest. Considering the combination of traditionally separate locomotion systems in a singular, self-contained system, the robot may be used as a reference for future robotic research and innovation, leading to the founding of new start-ups, industries, and economic sectors. |
