The Problem
|
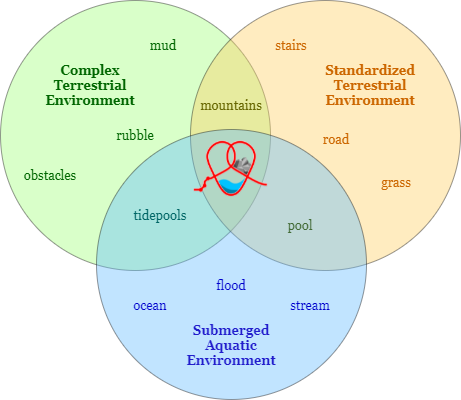
World environments are rapidly changing, often suddenly. There is a growing need for robust and adaptable systems to be able to provide aid and support.As a result, we at HARRT are designing a multipurpose amphibious robot. While remaining flexible in its potential mission objectives, the main function of the robot is to broadly assist operations in submerged environments and on rugged earth. It will assist through reconnaissance, two-way communication, and transportation of supplies. Learn more about the problem space here. |
Our Process
|
Referencing the old adage of “measure twice, cut once,” our team is taking a meticulous and deliberate approach to our problem identification and solution construction. We are a diverse set of people with many interests and experiences and therefore we are also simultaneously tailoring our project to address many of our interests and by thoughtfully considering all options. Learn more about how we landed on our project and other problems we considered here. |
Our Solution
|
The goal of HARRT is to build on the current state-of-the-art research in amphibious robots by improving and balancing operational performance in multiple environments and by increasing mission objective flexibility. This will be achieved via a remote-operated system that uses a hybridized leg-wheel/track system for terrestrial locomotion and dual Hamilton jets for aquatic navigation. Learn more about our motivation, our solution, and its expected budget. |