Description of Beta Prototype
For our beta prototype, we sought to create a full scale navigation system that can help firefighters make their way through thick smoke. The prototype consists of two main components: the sensors and the display. Two ultrasonic sensors were mounted at chest height on the front straps of a harness to detect the distance to walls and objects in front of the user. A display showing the distance to the wall, in feet, detected by each sensor is contained within a mask comparable to the MSA G1, a commonly used mask in firefighting. The wiring and battery for the system were placed in a 3D printed housing mounted on the back of the prototype.
Intention / Purpose
Our purpose with this prototype was to develop a system that can detect walls for individuals in zero visibility conditions, particularly firefighters who often face low visibility and smoke-filled environments, resulting in impaired vision.
Some other design attributes that were evaluated for this prototype included the limitations such a system would face and the feasibility of such sensors in such conditions. To see if the ultrasonic sensors could work in the smoky medium found in most fires, the alpha prototype found the accuracies and errors the sensor faces. This limitation was overlooked in the beta prototype, as well as the reality that such a system would face complications with heat, water and impact. Which would be common due to the conditions firefighters work in. It was evaluated how well this system can detect walls and communicate distance of solids to the wearer. This was done in a display meters from the object/wall.
Evaluation Procedure
The system was tested in a large room with walls organized as shown:
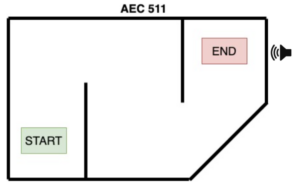
Volunteers were briefed on how the system operates and how to interpret the display prior to entering the room. The mask was then covered, essentially blindfolding the user. For their first trip through the room, the display was shut off and users were told to navigate by feeling around with their hands. A sound was playing at the end of the course to provide a general sense of direction. Data for the time through the course and the number of collisions was tracked. The display was then turned on, and the user was sent back through the course. They were told the course had changed, although it had not. Time and collision data were then collected following their trial with the display turned on.
Final Timeline:
02/02/2023 – Organized 3 sub-teams to focus on test development, sensor programming, and prototype manufacturing
02/16/2023 – Alpha prototype/ proof of concept developed and tested
02/20/2023 – Alpha Prototype Presentation and Feedback
03/01/2023 – Firefighter interview
03/09/2023 – Beta Prototype Proposal
03/20/2023 – Begin building Beta Prototype
04/13/2023 – Beta Prototype testing session 1
04/24/2023 – Beta Prototype Presentation and Feedback
04/27/2023 – Beta Prototype testing session 2
05/04/2023 – Impact Testing and Project Conclusion
Final Budget:

Team member contributions and charter:
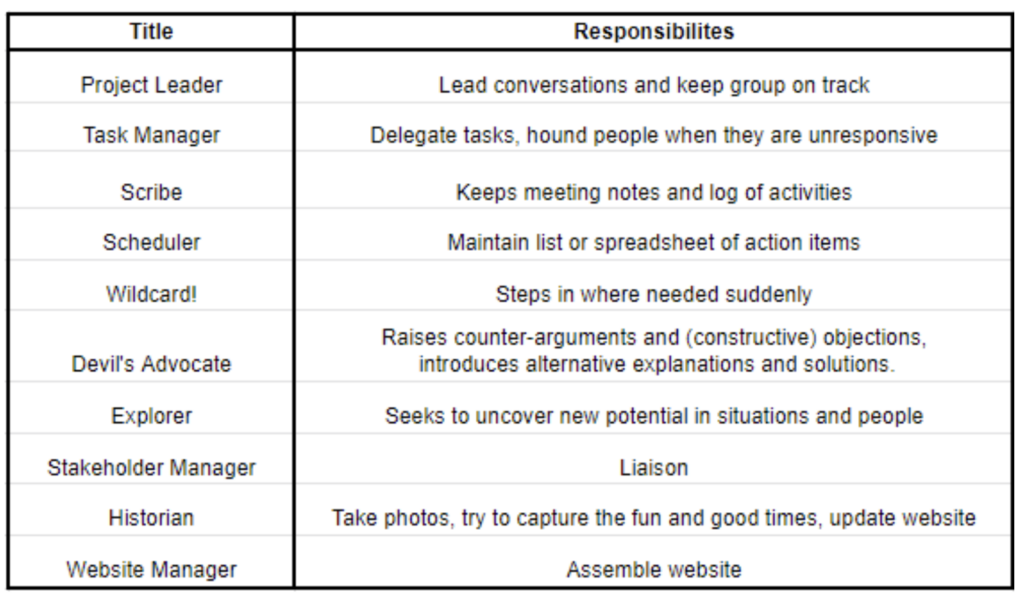
Project Leader – Chris Bluni
Task Manager – Dylan Phee
Scribe – Ryan Dengler
Scheduler – Edward Watson
Wildcard – James Schoudel, Ryan Puri, John Cortazar, Tim Paulis
Devil’s Advocate – Jamison Crow
Stakeholder Manager/Budgeter – Ethan Scott
Historian – Connor McAttee
Website Manager – Jake Stern
Beta Prototype Presentation Posters