First Semester Plan:
Our established goal is to meet the requirements for competition in the NHRL. We have additionally determined the subsystems that must be incorporated in our robot. Each team member will oversee one or two robot design tasks.
Now that we have iterated our CAD model several times, we are looking towards iterating our physical product. We are in the process of purchasing parts such as motors and chains and constructing various models of the frame, including cardboard and 3D printed models. Moving forward, we plan to work on purchasing and manufacturing all the mechanical parts we need so that we can construct a working model. We will concurrently be working on controlling and coding the robot followed by figuring out how to control it with a remote control.
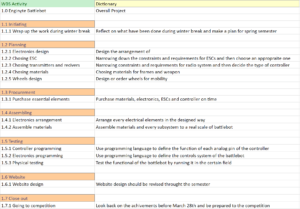
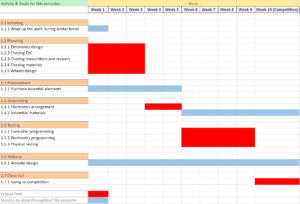
WBS & Gantt Chart

Click here for complete Gantt Chart
Second Semester Plan:
Our established goal is to meet the requirements for competition in the NHRL. We have additionally determined the subsystems that must be incorporated in our robot. Each team member will oversee one or two robot design tasks.
Now that we have iterated our CAD model several times, we are looking towards iterating our physical product. We are in the process of purchasing parts such as motors and chains and constructing various models of the frame, including cardboard and 3D printed models. Moving forward, we plan to work on purchasing and manufacturing all the mechanical parts we need so that we can construct a working model. We will concurrently be working on controlling and coding the robot followed by figuring out how to control it with a remote control.
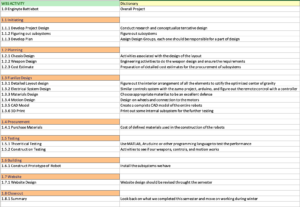
WBS & Gantt Chart