Battery:
The motor we selected needs an AC voltage supply. The rules pertaining to batteries say Lithium Polymer batteries are allowed in combat and are the most common battery type according to [2]. The batteries are something that will be decided near the end of the design processes to see how much power you actually will need to power the parts you are putting on the bot [3].
This will be a section definitely revisited and asked by the ECE department at Lafayette College as well as asking the Lehigh Robotics Club on their recommendations to get a good idea of the best battery for this job. As of now, we expect to use something similar to these batteries that are 14.8V:

These batteries should give us the desired amount of voltage and amperage for the time we need to use the robot for, but we will make sure with these other groups stated as well to get more information.
Cost: $75 (off sale)
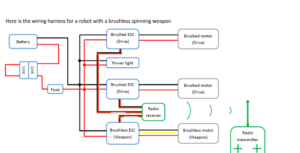
Electronics, Controls, and Safety Features:
When coming up with how to connect the other electronics, this was not an easy task. This will likely also be an area to be explored more in depth with talking with ECE department professors, robotics professors, and people in the robotics field (ex: Professor Bursing from Lyme-Old Lyme High School who is a member of the Team 236 Techno Ticks FIRST Robotics Hall of Fame Team).
Transmitter:
According to the source above, the recommended transmitter is:[4]
![]()
For our purposes, we only need the FrSky transmitter as we only need to steer and turn on and off our robot, so this will be sufficient for our combat robot. More research is to be done on this.
Cost: $138
Receiver:
A recommended receiver is seen below:[4]
This receiver is DSMX with DSM2 Backward compatibility with our transmitter which is necessary. This will definitely be checked with a ECE and knowledgeable engineering professor on campus to ensure compatibility and up to recommendation standards. More research is to be done on this.
Cost: $40
ESC:
The ESC recommended for this section is shown below:[4]

Cost: $90
This ESC is seemingly sufficient; although, more research is to be done on this to ensure comparability with our other components.
Fuses:

MIDI fuses and automotive, blade fuses are good options. When looking at fuses of the MIDI selection, they all are the same price of about $10. The exact Amperage of the fuse is unknown at this moment but fuses in this range are about the same price regardless so $10 is a good estimate for cost.
Cost: $10
Connectors:
The XT60 or crimped ring connectors were recommended. I agree with this recommendation as I also saw it recommended in 1.MET2019_Giese_Justin.pdf as well as https://www.instructables.com/How-to-design-and-build-a-combat-robot/.

We might need possibly 2 of these or more, but since they are not too expensive in comparison to other things and might be needed for more, let us assume we get 3 of them. So a rough price guess of about $30.
Cost: $30
LEDs:
LEDs are cheap. No matter the brand these are mostly standard and good for use whatever kind they are according to the rule book.
These ones I found just for example price, the brand does not matter too much.

Cost: $3
Total Cost Controls: $388
Sources:
[1]https://www.robotshop.com/community/tutorials/show/basics-how-do-i-choose-a-battery
[2] https://www.stem.org.uk/system/files/elibrary-resources/2019/07/How%20to%20build%20a%20combat%20robot%20V1.2.pdf
[3] https://www.instructables.com/How-to-design-and-build-a-combat-robot/
[4]Recommended resources are from https://www.stem.org.uk/system/files/elibrary-resources/2019/07/How%20to%20build%20a%20combat%20robot%20V1.2.pdf