Project Title: Autonomous Surveillance Robot for Search and Rescue
Team Members: Gabby DeAdder, Alex Villalba
Course: ECE 414 – Embedded Systems
Project Overview
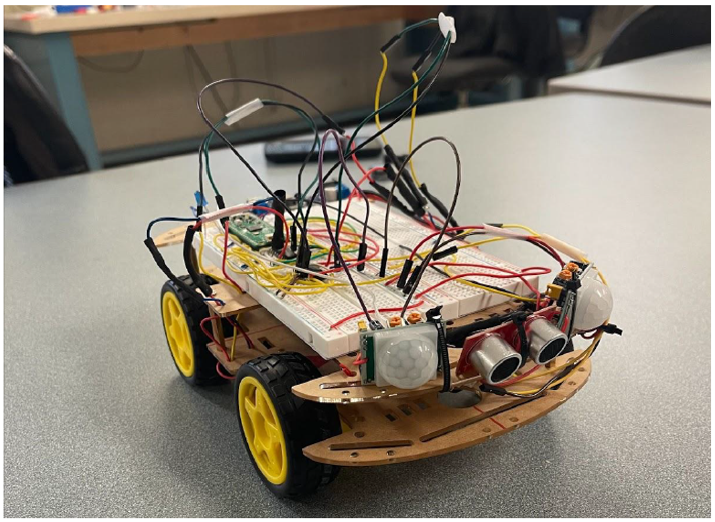
This final project involved the design of an autonomous supporting device for rescue operations in situations such as natural disasters or conflict zones. The robot is capable of operating automatically without a driver. It detects people as it moves through an environment and, upon detection, was designed to send a radio signal with the coordinates of the person in need of rescue.
Key Features & Objectives
The robot was designed with the following core capabilities:
-
Autonomous Navigation: Moves and navigates environments independently.
-
Human Detection: Uses PIR sensors to detect motion from up to 5 meters away.
-
Obstacle Avoidance: Employs ultrasonic proximity sensors to detect and avoid obstacles within 15 cm, ensuring smooth navigation.
-
Long-Range Communication: Utilizes LoRa radio to transmit data, such as GPS coordinates, over long distances to a mobile device.
-
Robust Power Management: Powered by a 3000mAh battery with a voltage controller for stable operation.
Technical Implementation
Hardware Core:
-
Microcontroller: Raspberry Pi Pico
-
Sensors:
-
PIR (Passive Infrared) Sensors for motion detection.
-
Ultrasonic Sensors for obstacle avoidance.
-
-
Actuation: DC motors controlled via an H-Bridge motor driver.
-
Power: 3000mAh battery with a voltage regulation circuit.
Software & Framework:
-
Framework: Arduino
-
Key Modules:
-
Motor Control: Custom functions for forward, backward, left, and right movement using PWM signals.
-
Obstacle Avoidance: A core loop that measures distance and triggers evasive maneuvers (back up and random turn) upon detecting an obstacle.
-
PIR Sensing: Continuous monitoring to detect motion and trigger alerts.
-
Challenges & Adaptations
The project presented several real-world engineering challenges:
-
Component Compatibility: The original design included an infrared camera for human classification and an accelerometer/gyroscope for better navigation. These were ultimately not integrated due to time constraints and compatibility issues with the Raspberry Pi Pico.
-
System Integration: Bringing together sensor data, motor control, and communication modules required significant debugging and a deep understanding of both hardware and software interaction.
-
Hardware Design: Designing and implementing the motor driver circuit (H-Bridge) for precise control of the robot’s movement was a complex task.
Results & Demonstration
The successfully implemented robot can:
-
Autonomously navigate a space using its motor system.
-
Detect obstacles using ultrasonic sensors and execute an avoidance routine (stop, reverse, and turn).
-
Detect motion using PIR sensors.
Conclusion & Future Work
This project provided a comprehensive dive into the field of embedded systems. It offered hands-on experience in high-level project design, sensor integration, and the complexities of hardware-software co-design. The work involved advancing C programming skills and gaining valuable insights into working with Arduino and the Raspberry Pi Pico.
Future enhancements could include:
-
Integrating the originally planned LoRa module for long-range data transmission.
-
Adding an infrared camera to distinguish between humans and other moving objects.
-
Implementing an accelerometer/gyroscope for more precise navigation on uneven terrain.
-
Developing a more sophisticated navigation algorithm to replace the random turn for obstacle avoidance.