Project Title: Modular Drone Platform – A Customizable Aerial System
Team Members: Aaron Keyser, Paris Francis, Denis Didenko
Course: ECE 414 – Embedded Systems
Project Overview
This project aimed to design and build a customizable, modular drone platform to address the limitations of commercial and educational drones. Commercial drones often lack specialized components and are challenging to modify, while existing educational models are not flexible for customization. The goal was to create a budget-friendly, versatile platform that could be easily adapted with various peripherals like environmental sensors, cameras, or spray nozzles, providing a foundation for specialized applications.
Key Features & Objectives
The system was designed with the following core requirements:
-
Modular Core: Use the Raspberry Pi Pico as the primary control module for both the drone and a custom remote controller.
-
Full Flight Capability: Enable the drone to take off, land vertically, hover in place, and move horizontally in all directions while rotating about its center.
-
Custom Remote Control: A battery-powered remote with buttons for all axes of movement and an integrated LCD screen.
-
Real-Time Telemetry: The remote’s LCD displays live data from the drone, including acceleration and tilt angle from a gyroscope.
-
Obstacle Detection & Peripherals: Integration of an ultrasonic sensor for obstacle detection and a design that supports adding various peripherals in a modular fashion.
Technical Implementation
System Architecture:
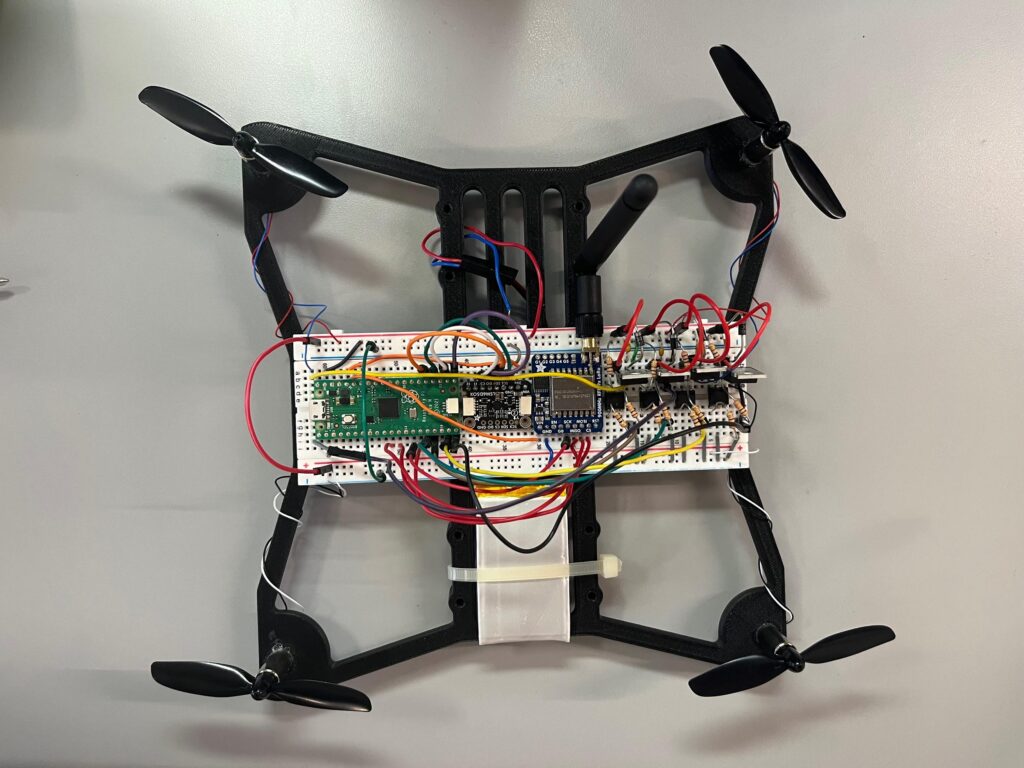
The project consisted of two main hardware units communicating via LoRa radio:
-
The Drone: A quadcopter built around the Raspberry Pi Pico.
-
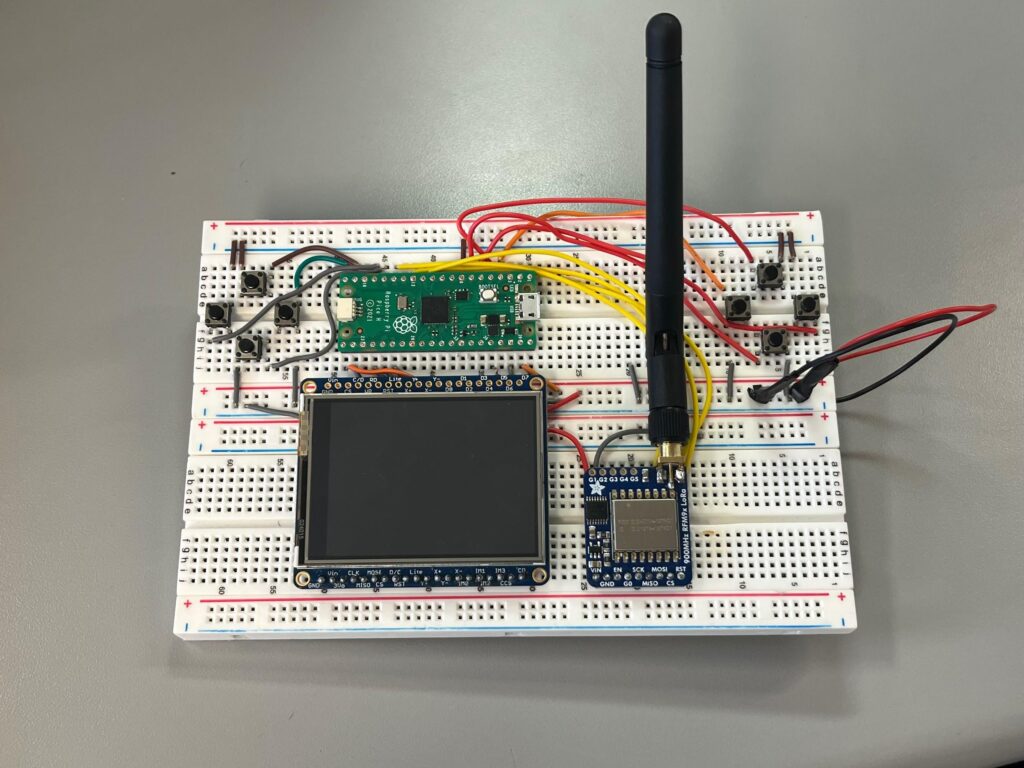
The Controller: A custom handheld remote, also built around a Raspberry Pi Pico.
Hardware Core:
-
Main Controller: Two Raspberry Pi Pico microcontrollers (one for drone, one for controller).
-
Sensing & Communication:
-
LSM6DSOX Gyroscope/Accelerometer for orientation and motion data.
-
LoRa (RFM9X) radio transceivers for communication between drone and controller.
-
HC-SR04 Ultrasonic Sensor for obstacle detection (planned but not integrated).
-
-
Actuation: Four DC motors controlled via PWM signals through power MOSFETs.
-
User Interface: Custom remote with button arrays and an LCD screen for telemetry display.
-
Power: Separate battery packs for the drone and the controller.
Software & Framework:
-
Framework: Arduino
-
Architecture: The software was designed with a modular structure, split across multiple files for different functions (radio I/O, sensor input, motor control, etc.).
-
Control Logic: A detailed Finite State Machine (FSM) was designed with five states (Initial, Calibration, Fault, Vertical Flight, Horizontal Flight) to manage the drone’s flight modes and error handling.
Challenges & Learning Outcomes
The project provided significant learning experiences in complex system integration:
-
Power Management: The team encountered challenges with insufficient battery power to achieve lift-off, highlighting the critical importance of power system design in robotics.
-
Wireless Communication: Implementing a robust LoRa communication link between the controller and the drone proved difficult and was a key factor that limited higher-level functionality.
-
System Integration: Bringing together motor control, sensor data acquisition, wireless communication, and user input into a single, coordinated system was the project’s central challenge.
-
Hardware-Software Co-Design: The need to switch development environments to Arduino and adapt the modular software plan to its library-based structure was a valuable lesson in flexibility and practical engineering.
Results & Conclusion
While the project did not achieve its ultimate goal of stable flight, it successfully demonstrated a strong foundation in both hardware and low-level software. Key accomplishments include:
-
Successful construction of the drone and controller hardware, including motor driver circuits and sensor integration.
-
Validated low-level unit tests for the LCD display, gyroscope, and motor drivers.
-
Created a comprehensive and well-documented architectural plan for a complex embedded system.
The project serves as an excellent case study in the engineering design process, underscoring how challenges in core communication and power systems can impact overall functionality. The modular design and detailed planning provide a solid base for future work to build upon, such as completing the communication code and integrating the planned peripherals.
The team invested a total of approximately 72 hours into the project.