Overview
The mechanical system is the foundation of the AuBi system. It has use in both the development and end use of the robot. Each subsystem must exist as more than a theoretical idea on paper, and the physical design provides a space for each component to live. To the end user, a well designed physical system separates users from all of the components on the inside. This ensures that users only need to worry about how they would like to use the system, not concerning themselves with wires and construction. The selected design is a minimally invasive, friendly, and simplistic one. It is vital that AuBi does not interfere with regular hallway activities, but is approachable for people of all ages who would like to interact with the system. This design is one that balances each of these facts, resulting in rounded corners, and minimal technology visible to the outside.
Current Design Iteration


 =
=
*Click here to view previous design ideas and iterations
Current Research
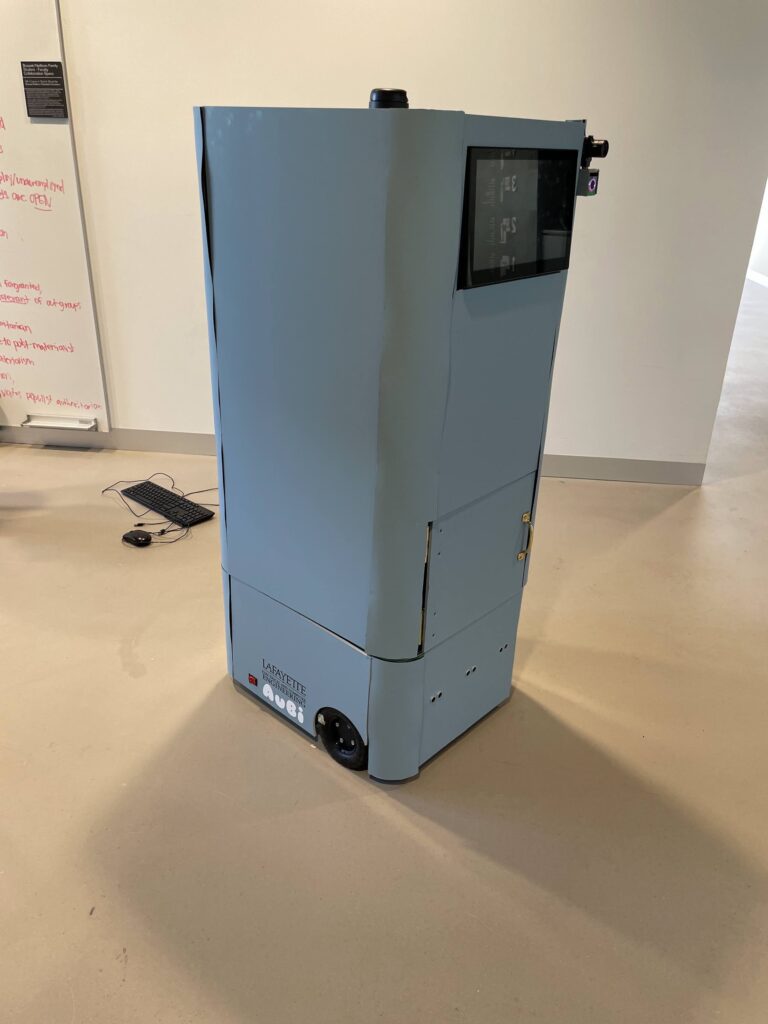
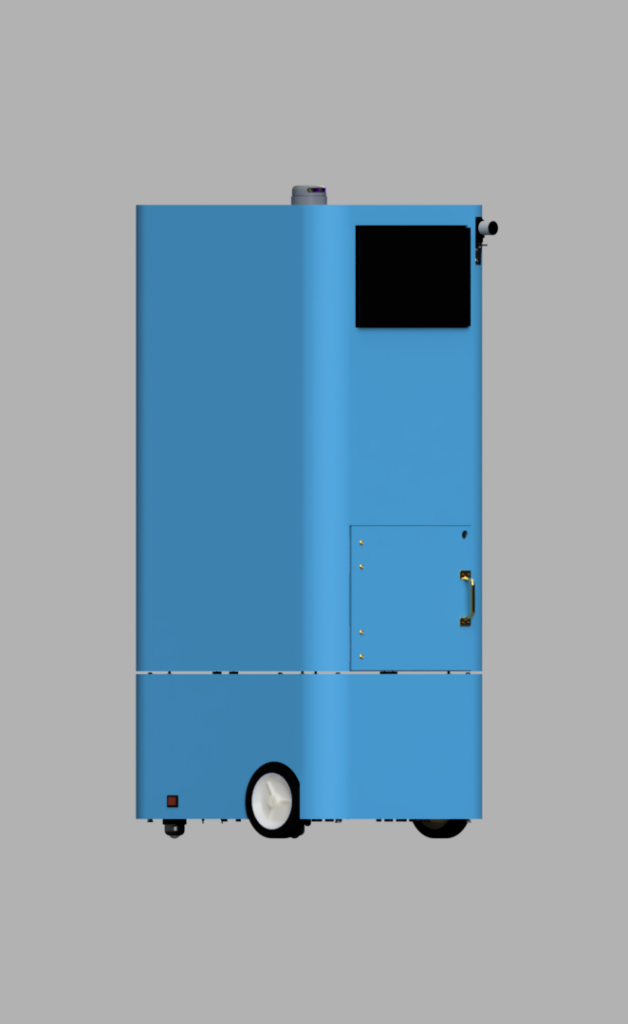
The highest priority in our robot design is ensuring that it is unthreatening in both looks and function. From a physical standpoint, we ensure that there are no sharp corners, no loose components, and a rugged and stable base. Additionally, we ensure that there are flat faces to provide an easy interface with our wireless charging base.
Ease of maintainability is another crucial factor in our robot design. With such a complex system, things are bound to go wrong over time. This resulted in creating a modular, two part design (top and bottom) with easily detachable side panels for maintenance.
Modularity gives the option of repairing and upgrading with ease. Should a computer fail, the entire base plate does not have to be serviced, but instead the separate computer plate can be removed for easy access to the computers inside. Having a separate plate also allows us to add components with ease. We can remove just the computer plate from the base, and cut holes to add the new components. We also have the option to easily change out wheels or motors at any time as these parts are separated from any others in the design.
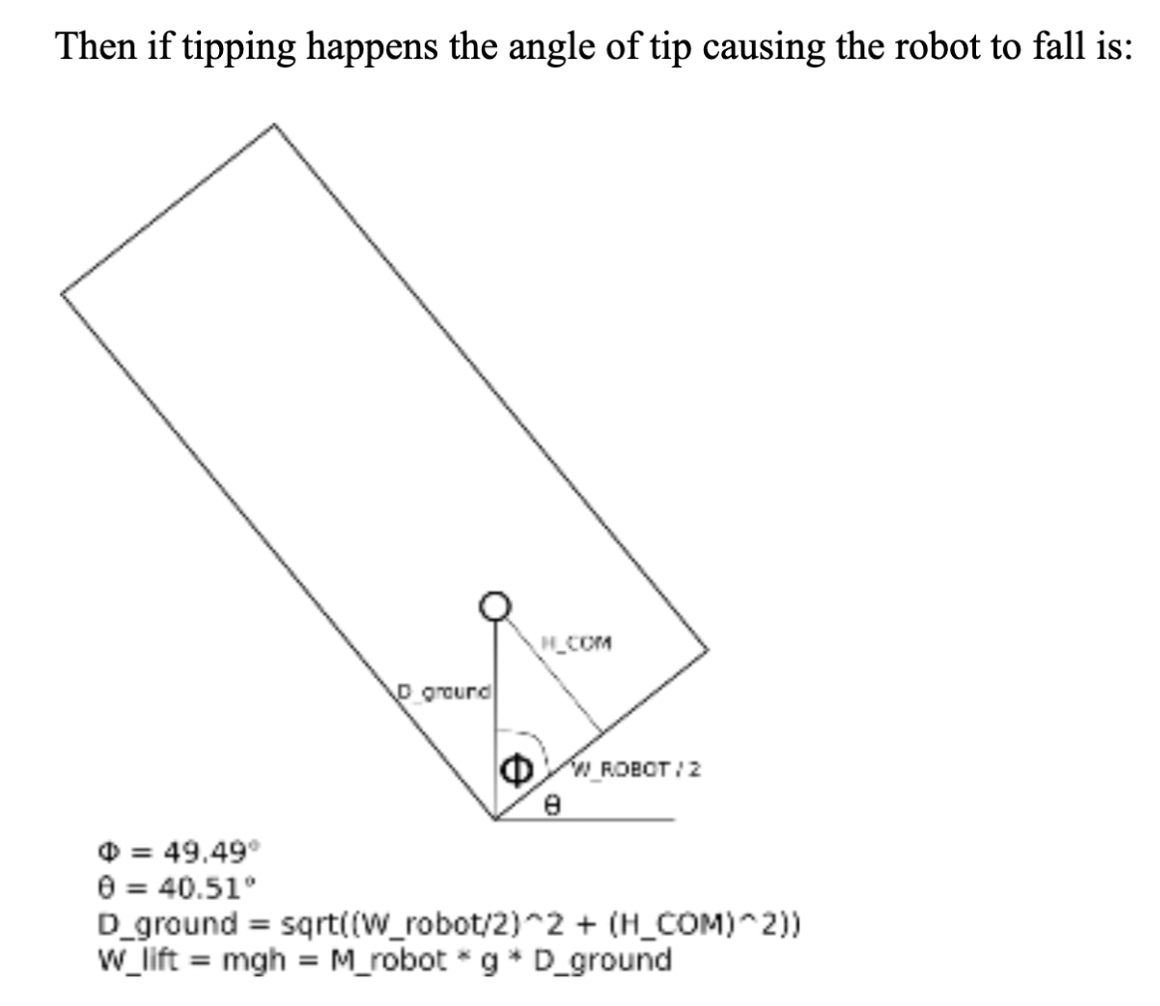
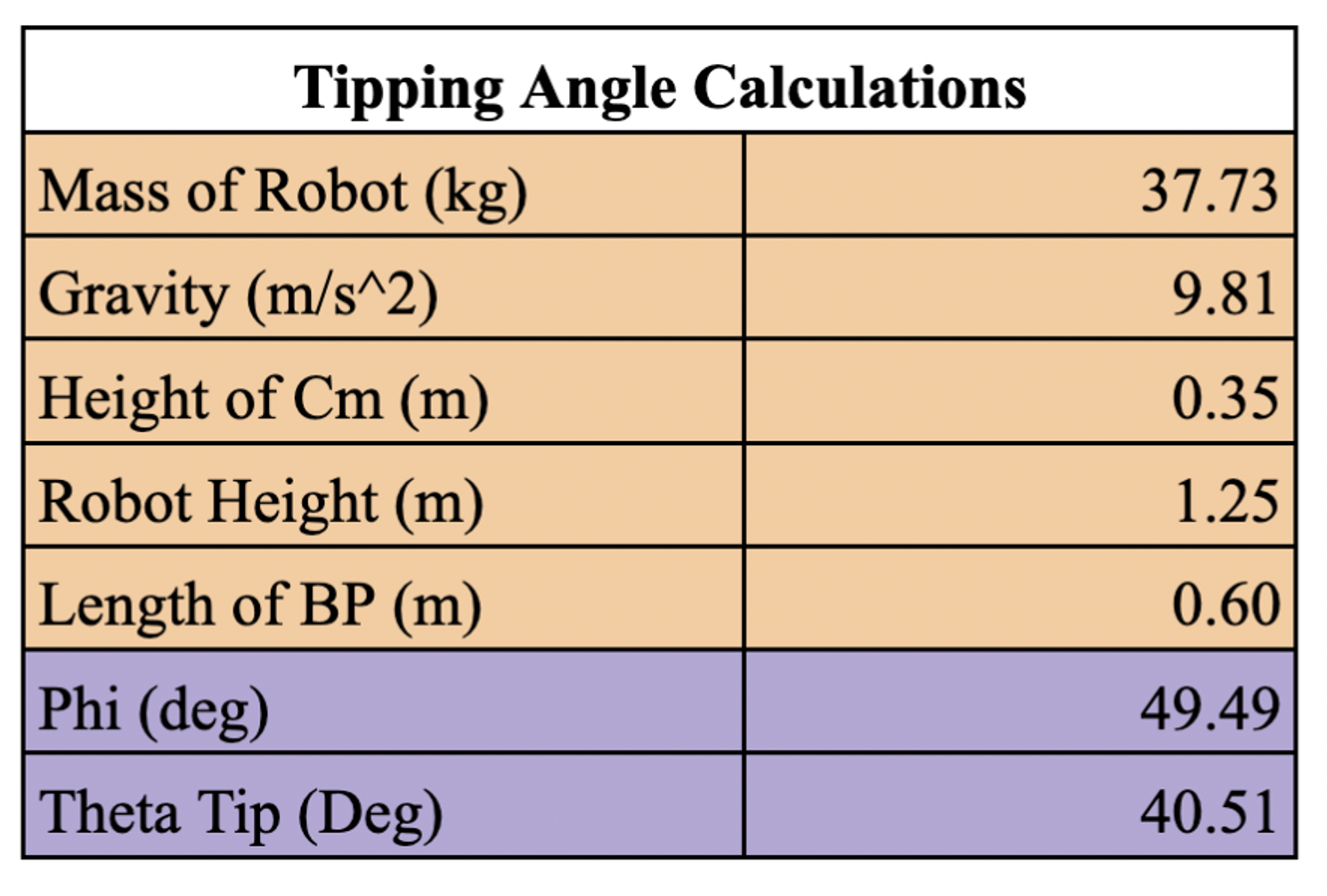
The split portion robot is part of a modular system. Splitting the robot in two allows us to fit major components (drive system, computers, etc.) into the bottom portion, while separately designing the top portion which is more focused on user interface and interaction. Having a split design also provides a small amount of space for the robot to lean without tipping. Detecting this with an internal IMU allows us to detect tipping, and flash an alert before the robot falls.
The Storage System
AuBi is designed primarily for hospitality services in community settings. As such, an ability to deliver comfort goods is a key feature we would like to see in a final design. As of now, AuBi features one large compartment with a locking mechanism that can be used to transport any kind of item. This compartment opens by a simple hinge mechanism. When the package is secured, the user must close the compartment manually, and allow the servo-based locking mechanism to hold the compartment closed.
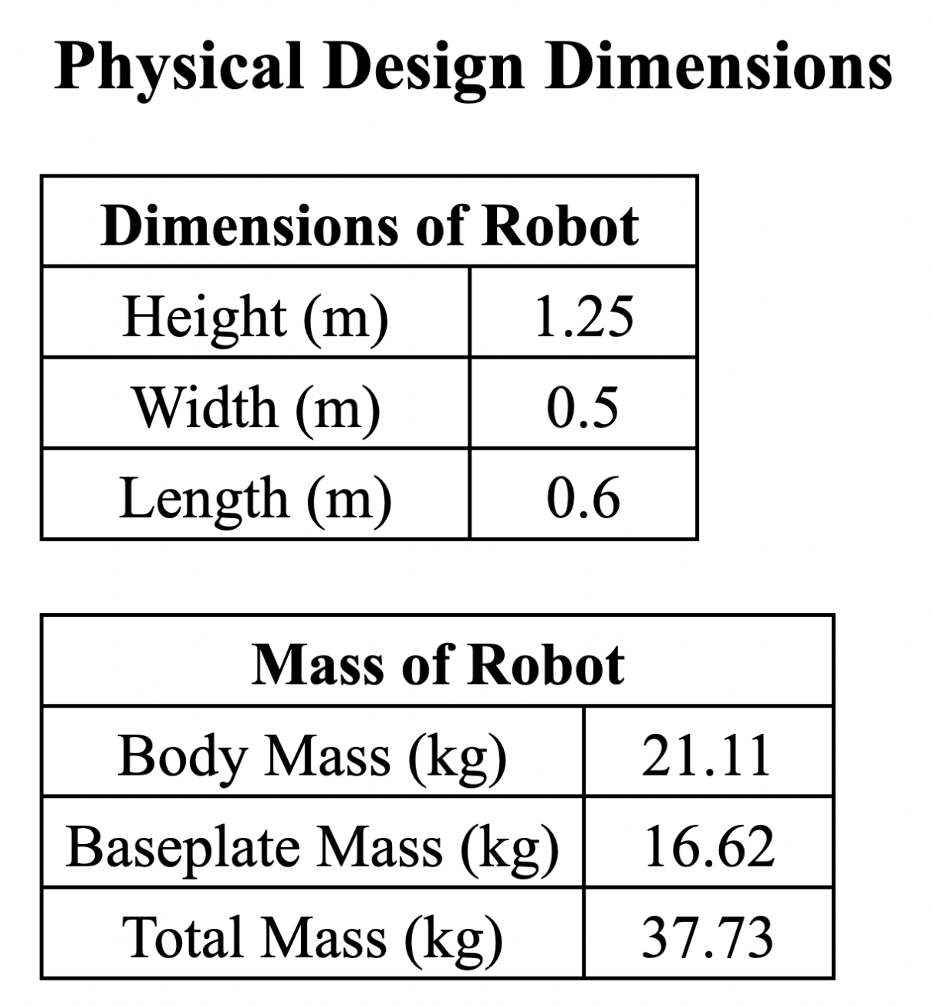
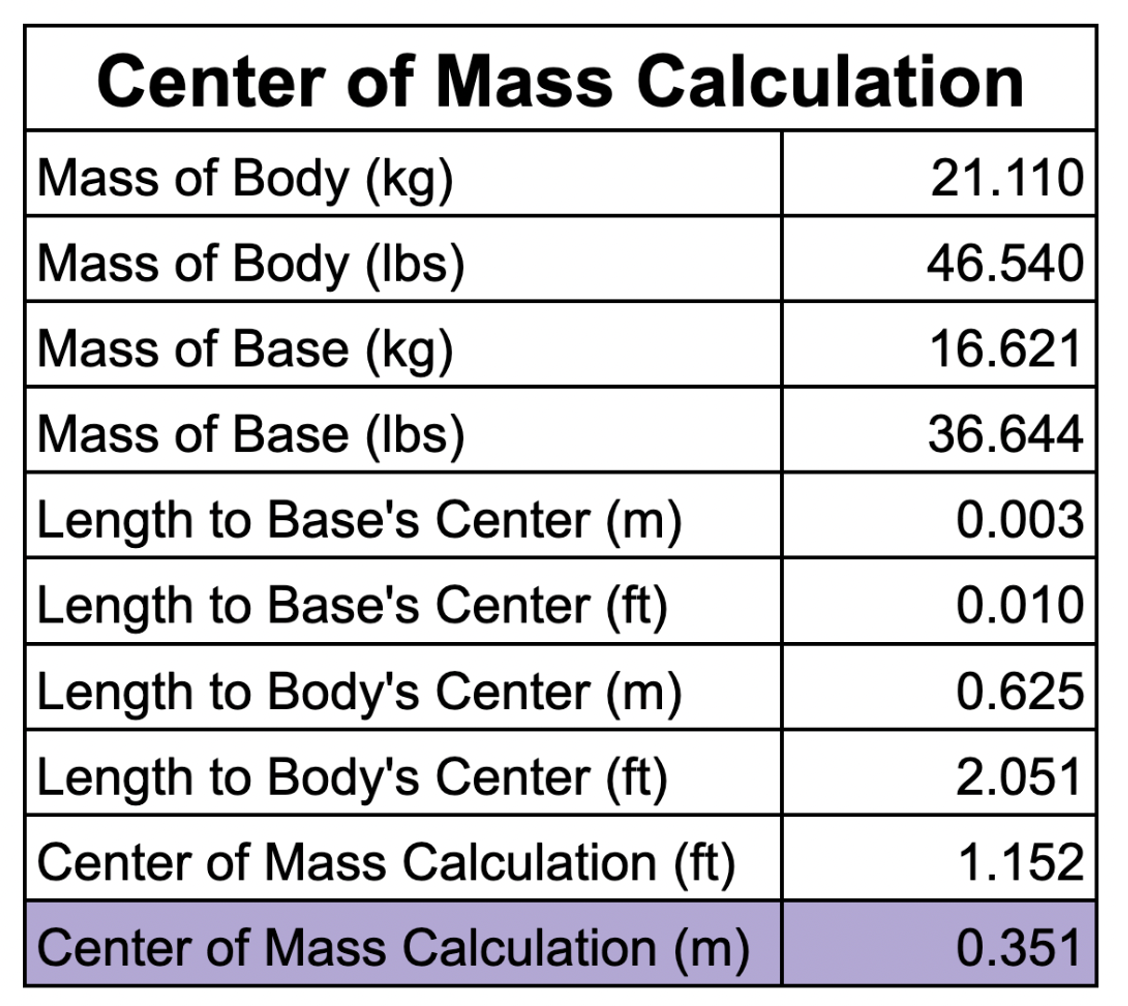
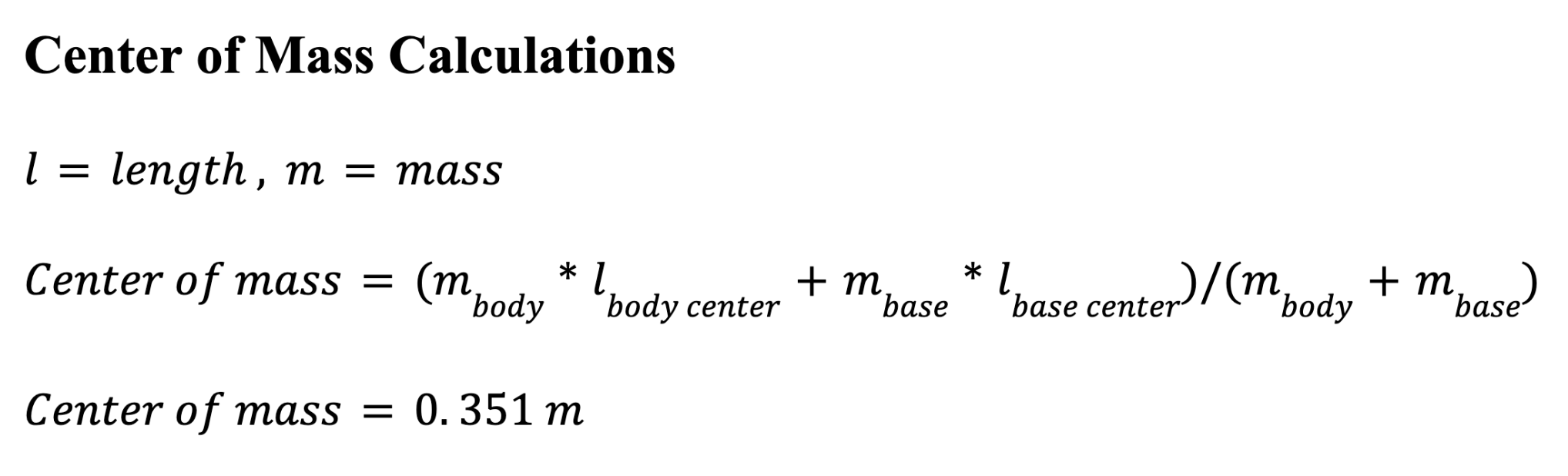
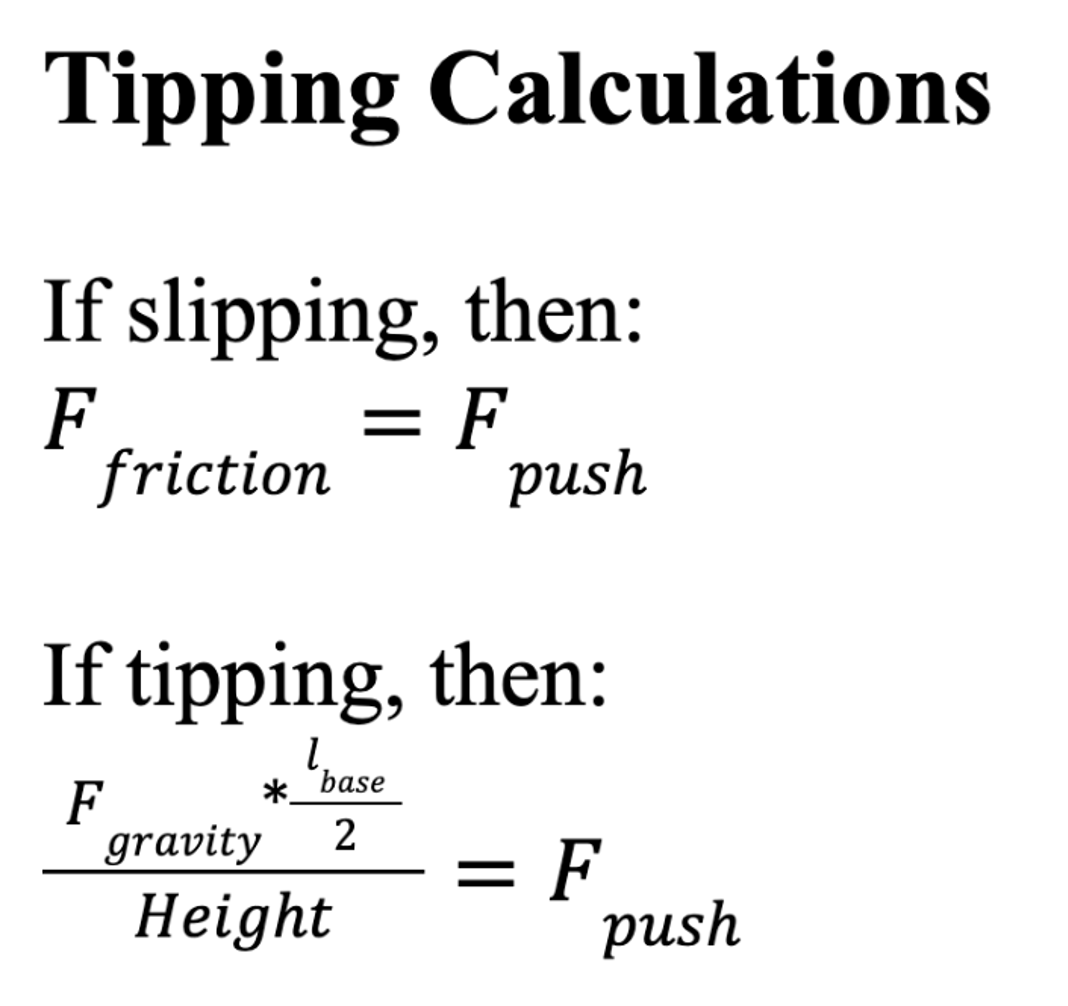
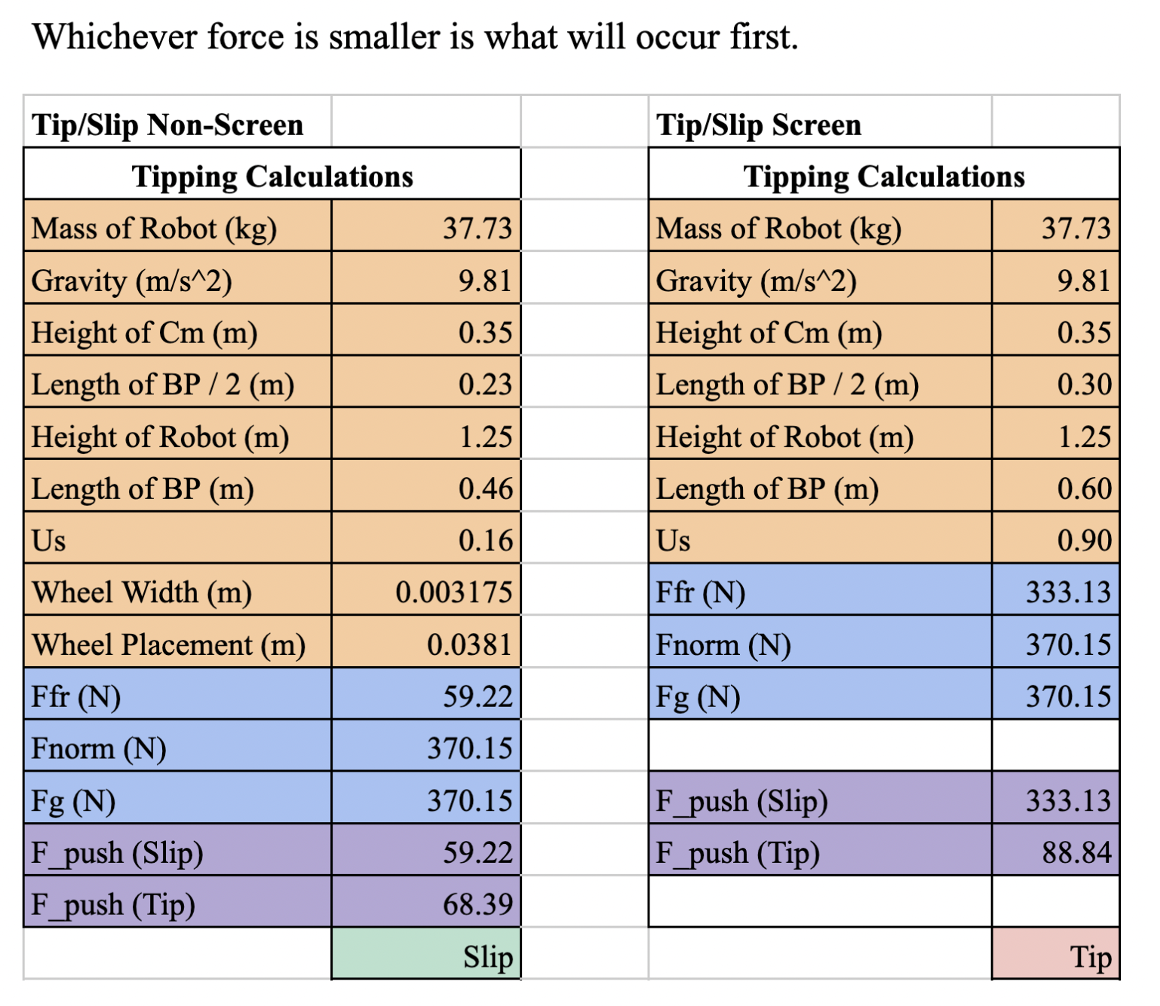
Design Calculations
Future Research
The largest takeaway from this first pass at physical design is the fact that design is an iterative process, similar to writing an essay. First attempts rarely work, and patience is truly a virtue. Creating a poor design is just the first step in finding the best solution to a problem. This base began with all computers mounted directly to the base plate, and this bad choice led to the more modular final design, and a design strategy that is helpful moving forward.
Having completed our build, some adjustments would be highly recommended for future iterations. First would be adjusting the height of the robot. Our decision of 1.25 meters, while agreed upon and built to spec, ended up being too tall. We found that it would be difficult for those in wheelchairs to interact with the robot, and the LiDAR has a hard time picking up boundaries with higher windows. Next, we would change the material used for the curved corners. The rubber, while flexible, does not hold a shape, and made it very difficult to make a clean corner.
In the future, it is our hope that AuBi will evolve to have several automatic storage compartments. The modular design of the robot allows for an easy implementation of new designs on the top portion of the robot. AuBi, with an array of compartments, will have a knowledge of what is in each compartment, and who the desired recipient is. The delivery mechanism will, rather than a manual door, be a mechanized drawer that will present the item to the end user. After completed delivery, the drawer will close itself, and lock the compartment with a more robust lock box solution.
Literature Review
T-Slotted Aluminum
Designing with T-Slot Aluminum Extrusions – Design guide
The following is a comprehensive guide to using t-slotted aluminum for the purpose of general structuring. Included are best practices for creating joints and mounts, as well as equations to be used for load and safety measurements. On the same company’s site is an ordering sheet where you can purchase the exact parts discussed in the article. Some things to consider about this document are the fact that they do not have specifics on design in general, and that this is a product sheet, and it is written by a company such that you purchase their product.
Mobile Robotic Platforms
EML2322L — Mobile Robotic Platforms
These lecture notes provide useful examples for finding the center of mass of a multi-part design. Steps are broken down, describing how to quickly get a good estimate for the center of mass.
Acrylic Mounting
80/20 Inc: Panel Mount Block Overview
A short video describing, in detail, how to use t-slotted framing panels to add acrylic sheets to the exterior of our robot frame.
Slip vs. Tip Analysis
A very basic, but informational guide to performing tip/slip analysis on a system. See also https://www.purdue.edu/freeform/statics/tipping-vs-slipping/.
Community Robots for Dementia Patients and Caregivers
Robots for Joy, Robots for Sorrow: Community Based Robot Design for Dementia Caregivers
The following is a research paper about an experiment conducted about use of a community robot in an Alzheimer patient facility. Considered are different very basic designs that could be useful for different applications such as food delivery, exercise, and entertainment. The paper gives in depth information about what Alzheimer patient caregivers would want from a care robot, as well as designs they would like to see. The paper provides information that we must consider when designing different portions of our robot.