Design Overview
We aim to aid healthcare professionals everywhere by providing the automated services of a robotic assistant. Designed to assist in long term care facilities, AuBi provides services including food delivery, patient tracking, basic entertainment, and locational assistance. AuBi also takes workload off of understaffed nursing teams, allowing them to focus on only the most important tasks for their patients’ care. In our implementation of the AuBi robot, we demonstrate a variety of functions which are helpful to healthcare workers on the Electrical Engineering floor of the Engineering building of Lafayette College. The reason we choose this form of demonstration is because of the similar nature of the hallways of the Electrical Engineering floor to those of a nursing home or an extended care facility.
Intended Use Case
In order to perform the intended duties, AuBi has to be equipped with a certain level of technology allowing autonomous movement in nursing home hallways without the need for someone guiding the movement of the robot. In principle, AuBi should be able to navigate through a generic hallway, being able to interpret where it is, avoid obstacles in its way, and be able to move with the installed drive system without posing danger to the surroundings. This need is due to the fact that AuBi is present in these facilities to help the nursing staff and take tasks off their plate. Needing aid for movement would defeat this purpose. Furthermore, AuBi should be able to calculate a path to a target destination and be able to navigate the hallways to reach it. This functionality will be essential when the robot is summoned by a patient or a nurse. AuBi will be able to go places without the need for any external intervention other than inputting a destination. It is also important to consider safety when implementing movement functionality. This is why AuBi is tested in the tipping and speed fronts to ensure the safety of patients and staff during its use in these facilities.
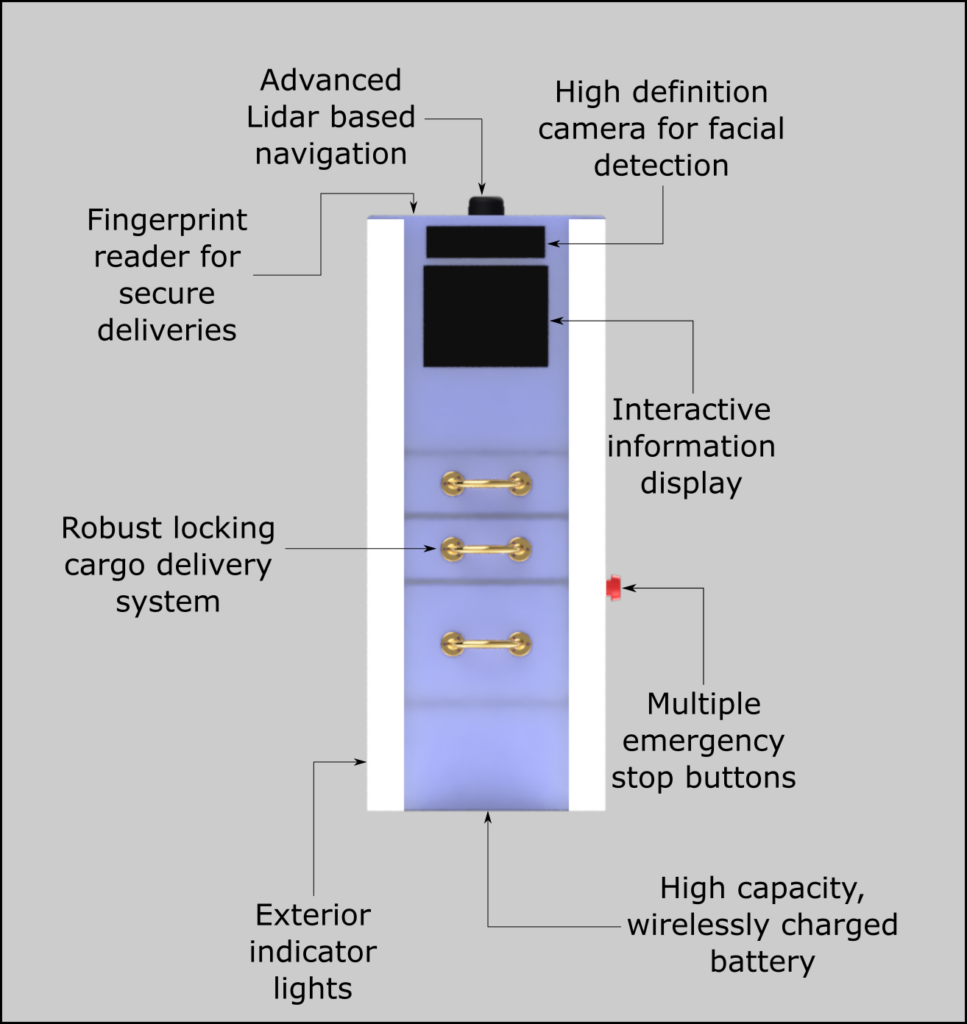
In addition to the essential movement capabilities, AuBi is further equipped with various other features which are useful to healthcare staff in long term care facilities. Through the biometric facial recognition technology, AuBi can be used for monitoring halls and recognizing the people around it and later on give daily report logs on these sightings. In addition to these logs, this feature can be used for many other implementations, one being alerting the healthcare staff of any sightings out of the ordinary (such as a patient on the floor, or an unrecognized person in the hallway). Furthermore, facial recognition will help the patient population interact with the robot on a more personal level allowing a more effective communication between AuBi and the community. Through the touchscreen user interface supported with LED light displays and microphone, AuBi creates many different ways to interact for the user taking into consideration a wide variety of individuals demands a wide variety of interaction channels. This touchscreen comes with convenient weather and news displays and any other daily calendar events in the main page giving the elderly living in long term care facilities a sense of the outside world. Furthermore, the display aids in interaction with the robot to initiate any other features that it comes with. Last but not least, AuBi comes with a cargo delivery system which is secured with a fingerprint locking system. This capability can be used both by nurses to deliver any essentials to patients without having to go to them personally and also allow them to store any medications or other medical supplies in the robot with an appropriate security system in place.
With many smaller features like playing music, demonstrating colorful displays and other forms of interactions, AuBi is the perfect balance between a helper to the healthcare staff and a friend to the facility community. Capability to wirelessly charge and ability to recognize low battery and go to charging station will create a smoother operation and relieve responsibilities off of the staff.
Mechanical Design
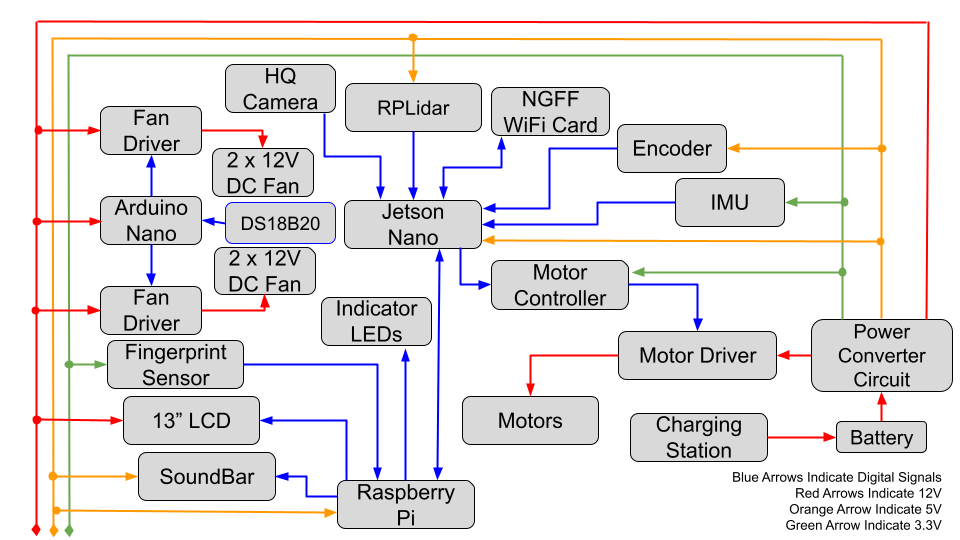
Electrical Design
Subsystem Design



* Click on each subsystem to view further literature review, analysis, and design
Current Implementation
In our iteration of the AuBi design, some features are demonstrated in ways which translate better to a school department hallway but still represent the core features of AuBi and reflect the intended use cases. To demonstrate the effective movement and navigation of AuBi, the robot will come with the capability of delivering hallway tours for prospective students. This implementation does not necessarily mean that AuBi will be used for nursing facility tours but rather is used to show that AuBi can traverse through the hallway, recognize its location, know the surroundings and can interact with people through the user interface.
Furthermore, another demonstration which is tweaked for this iteration is the cargo delivery system. In this setting the cargo may look like papers between professors or circuit parts to be delivered when the intended use is for things like blankets or newspapers that the community needs or classified medical equipment that nurses need. The capability to lock the cargo box with fingerprint authentication will ensure that no one other than the intended person can access the contents. In conclusion, some functionalities will look different to make sense in the Electrical Engineering hallway context but these will show a demonstration of the real world implications of AuBi as well.
Literature Review
On the Regulatory Framework for Last-Mile Delivery Robots
Discusses the purpose of delivery robots and some of the specifications of the Starship development. Similarly to the starship delivery robot, we will use the robot to deliver items to patients in order to reduce the amount of time required by nurses to do the same job. Additionally, we will use a similar system for sensors in order to assist with safe circulation. While this robot is used for food delivery in a much larger setting than our robot will be used, we can expect the general specifications (required drive time, safety features, etc) to look similar.
Robotics in Nursing: A Bibliometric Analysis
https://sites.lafayette.edu/badrobot/files/2021/10/Robotics-in-Nursing-A-Bibliometric-Analysis.pdf
Looks into the use of robots to assist or augment nursing care. While this doesn’t so much inform how we move forward with the design of our robot specifically, it does indicate that we can expect to see more and more robotics in healthcare in the future.
Artificial Intelligence and Robotics in Nursing: Ethics of Caring as a Guide to Dividing Tasks Between AI and Humans
Discusses how we determine which tasks should be handled by AI/Robotics and which tasks should be handled by people in healthcare settings. Focuses on “The ethics of caring” and how the use of AI in healthcare alters how we view this, and what parts of this ethical dilemma rely on human factors. The paper discusses several different viewpoints on the ethics of caring and evaluates the use of robotics in healthcare from these perspectives
Relevant Standards
- FCC Part 15 RF Transmission and Interference
- ISO 13482:2014 Standards for personal care robots
- IEEE 802.11 for wireless communication
- IEEE C95: Safety Levels with Respect to Human Exposure to Radio Frequency Electromagnetic Fields
- ISO 29.xxx: Electrical engineering standards
- ISO 31.xxx: Electronics