
Purpose
With other functions that allow for terrestrial and submersible travel, a subsystem that allows for the dynamic transition between environments is essential to providing rapid support to users in the field.
Design Objective
The goal of this subsystem is to enable the robot to seamlessly transition between aqueous to terrestrial environments as an amphibious robot. This system will likely be integral to the climbing and scaling systems when encountering rocky shores, swampy areas, and other transition areas with unusual features. In the complex amphibious environment, the robots should possess multi-capabilities to walk on rough ground, maneuver underwater, and pass through transitional zones such as sandy and muddy terrain. These capabilities require a high-performance propulsion mechanism for the robots. Ultimately, amphibious robots have the main advantage in this entire stance.
Various mechanisms have already been designed that incorporate amphibious technologies, including:
RSTAR (Rising Sprawl-Tuned Autonomous Robot)

Pilant Model
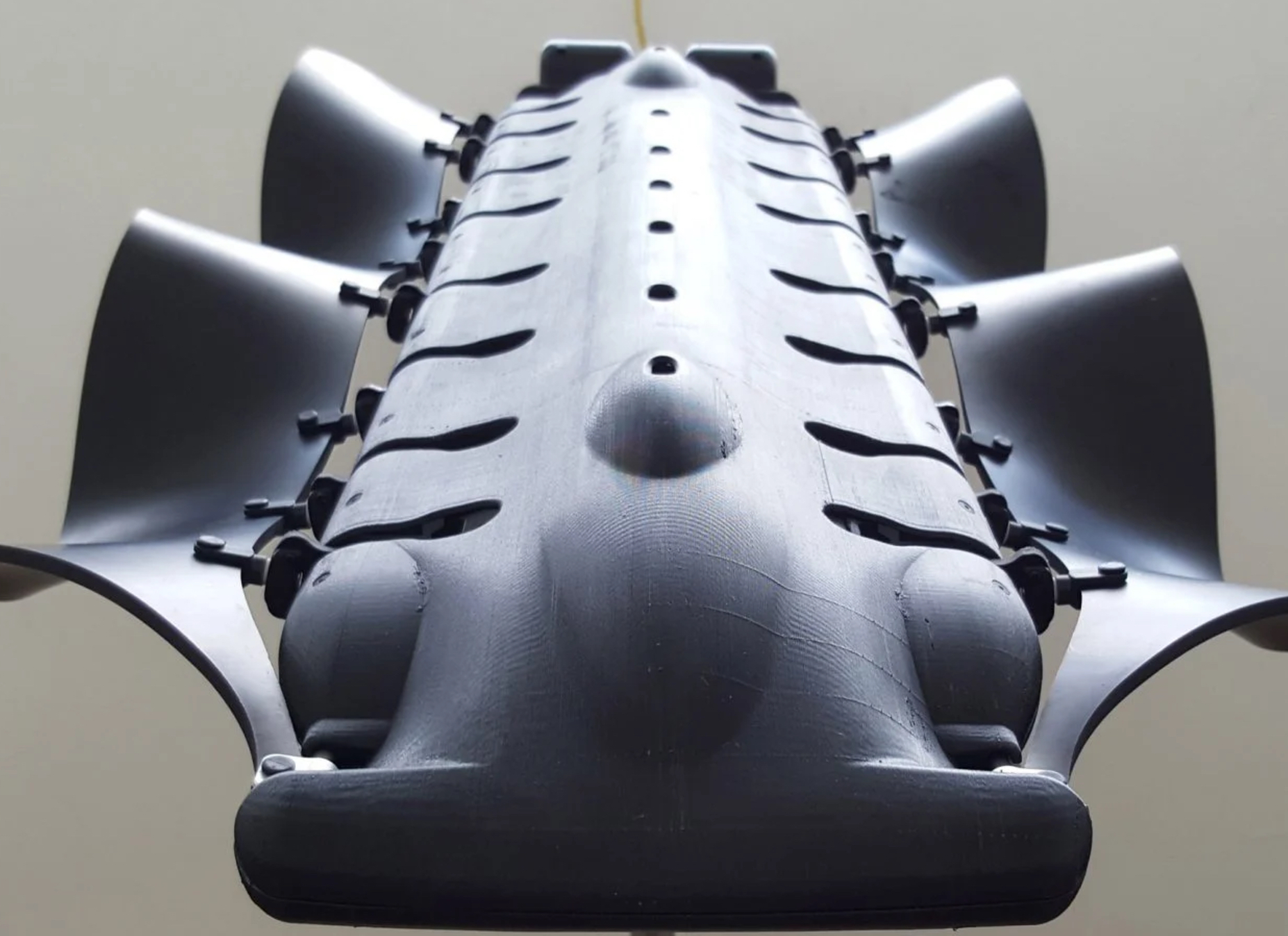
Eel Model

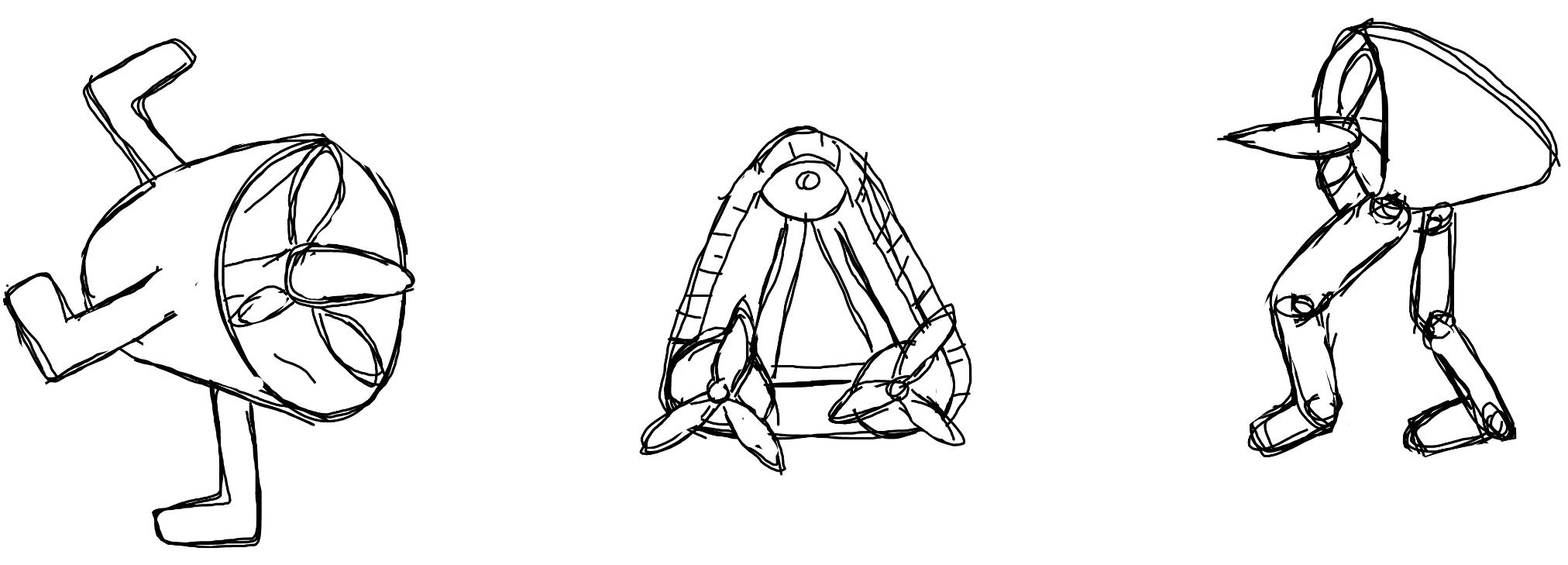
Original Concepts
Metrics
Constraints
Relevant Codes and Standards
- Will meet the codes and standards addressed in both the land movement sub-function and the swim sub-function simultaneously at all times in case of hazardous and unpredictable environmental conditions
Next Steps
- Understanding of what it will take for the robot to survive in the water and on land
- Propeller knowledge and understanding of the necessary propulsion to balance and keep upright as the robot proceeds deeper in water from land transition
- The physics of how both motion will occur on land and in water
- Buoyancy to be submerged but not sink and stay submerged as we enter the water
- Fluid mechanics in the air and water
Citations
- Ackerman, Evan. “Robot Shows How Simple Swimming Can Be.” IEEE Spectrum, IEEE Spectrum, 12 Aug. 2021, https://spectrum.ieee.org/swimming-robot-eel-epfl.
- Coxworth, Ben. “Sprawling, Crawling Robot May Someday Save Lives.” New Atlas, 18 July 2018, https://newatlas.com/rstar-sprawling-crawling-robot/55516/?itm_source=newatlas&itm_medium=article-body.
- Rima Sabina Aouf. “Amphibious Velox Robot Uses Undulating Fins to Swim and Crawl.” Dezeen, 10 July 2019, https://www.dezeen.com/2019/02/07/amphibious-velox-robot-technology/.